














































This paper is based on an article submitted to DVCon EU 2022 entitled How creativity kills reuse – A modern take on UVM-SV TB architectures. The subject of the former paper is an architecture that allows the user to define a fully modular testbench (TB) that does not have hard coded constraints, components, or tests. The motivation of developing such a testbench is to allow external control over the contents of an UVM-SV environment, as well as over the control variables and randomization constraints of the virtual/higher layer of sequences. One of the biggest advantages of such an architecture is the possibility to separate the stimuli generation from the SystemVerilog (SV) environment, opening the door to outside intelligent systems that can process data and improve the efficiency of stimuli generation. In this paper, such a system is presented, where data is gathered from simulation results and used to automatically adjust the input stimuli, in conjunction with other external variables.
The purpose of this paper is to set the groundwork and guidelines for a revised UVM/SV architecture and way of working that would tick the following boxes:
- Provide a general TB architecture that has a fixed structure and can be adapted to any verification requirements, no matter the scale, nature or complexity of the verified DUT
- Enforce the reusability of the TB by constraining the usage of user defined types to allow scaling down as well as scaling up the number of verification components via the factory (string-based definitions instead of hard types)
- Decoupling the stimulus generation from the environment and using the test as a translation layer for run defined stimulus (modular sequences and adaptable constraints settled at run-time)
Automate the process of constraint adjustments, sequence instantiation and environment scaling
Functional verification using co-emulation has seen a growing trend due to its main advantage: testbench acceleration. Co-emulation requires two main things: (1) a connection between the host machine running the testbench and the hardware platform where the design is synthesized, and (2) a software component for interacting with the design. Most currently available solutions for achieving a complete co-emulation environment are proprietary.
This paper describes an Open-source Framework for Co-emulation (OFC) used for communication between a UVM-SystemVerilog testbench and a design emulated on the FPGA logic of a PYNQ board. The OFC framework is split into two main components: a TCP socket-based client-server connection and a Python component that interacts with the FPGA using the API provided by Xilinx for the PYNQ board. Owing to its modular implementation, the two components can be used either together or separately, depending on the user’s needs.
AMIQ Consulting developed the FC4SC library to complement existing C++ and SystemC libraries with the coverage collection that at the center of any modeling and verification project. Functional coverage lies at the core of semiconductor functional verification as the primary metric to assess quality and track the progress of the entire verification process. FC4SC provides mechanisms for functional coverage definition, collection, and reporting. It can be used in any application compliant with the C++ standard, starting with C++11, including SystemC models.
The primary use for the library is to measure the level of exercise of C++/SystemC verification models or C++ applications, checking which features were tested and which parameters were used during the test runs. Verification engineers can augment an existing C++/SystemC project with functional coverage to assess the quality and diversity of test suites. With this library, SystemC/C++ projects have an accurate way to track level of feature exercise and, therefore, the overall verification progress.
The FC4SC library is designed to interoperate with other tools and technologies, providing an application programming interface (API) that closely resembles functional coverage definition and usage defined by the IEEE 1800-2017 SystemVerilog standard. The collected data is saved in the Accellera Unified Coverage Interoperability Standard (UCIS) format for future interoperability with other coverage tools. Users can generate reports showing coverage holes, partially covered coverage bins, and other coverage analysis metrics.
Functional verification using co-emulation has seen a growing trend due to its main advantage: testbench acceleration. Co-emulation requires two main things: (1) a connection between the host machine running the testbench and the hardware platform where the design is synthesized, and (2) a software component for interacting with the design. Most currently available solutions for achieving a complete co-emulation environment are proprietary.
This paper describes an Open-source Framework for Co-emulation (OFC) used for communication between a UVM-SystemVerilog testbench and a design emulated on the FPGA logic of a PYNQ board. The OFC framework is split into two main components: a TCP socket-based client-server connection and a Python component that interacts with the FPGA using the API provided by Xilinx for the PYNQ board. Owing to its modular implementation, the two components can be used either together or separately, depending on the user’s needs.
6.1 Portable Stimulus Driven SystemVerilog/UVM Verification Environment for the Verification of a High-capacity Ethernet Communication Endpoint
The scope of this paper is to present the steps taken and the challenges faced when using Portable Stimulus(PSS) as an abstraction layer on top of a SystemVerilog/UVM verification environment. The goal is the verification of a highly configurable, high-speed, communication endpoint, covering complex network scenarios and system-level corner cases. PSS is used in conjunction with SystemVerilog/UVM to increase verification efficiency by avoiding “scenario flooding” and keep a tight control of the verification space. All stimuli are defined in the test-bench and they are used to construct directed/random scenarios by utilizing a PSS generation model. The flow of the project in this case requires the SV/UVM VE to keep up with the guidelines for reusability while having an architecture that is compliant with the PSS mechanics of scenario generation. The paper addresses the possible issues and good practices discovered while implementing this verification strategy.

Functional Coverage for SystemC(FC4SC) is a C++11 library that provides support for functional coverage collection by SystemC/C++ applications:
- SystemVerilog-like functional coverage constructs
- Functional coverage inspection API
- UCIS database support
- Coverage databse merge utilities
- HTML/JavaScript coverage report
Yet Another Memory Manager (YAMM) is a SystemVerilog library that provides support for memory based operations:
- Buffers can be allocated following 6 allocation modes with any granularity or address alignment
- Buffers can be inserted by user (non-overlapping)
- Buffers can be deallocated either by address or by handle
- Buffers can be searched for in the memory space by address or by handle
- Buffers support payload, which can be assigned by the user, randomly generated, read and compared.
- Implements a fast buffer search algorithm
Beside these features YAMM provides debug facilities (e.g. memory map dump, usage statistics) and it is easy to integrate it with existing verification environments.
Yet Another Memory Manager (YAMM) is a SystemVerilog library that provides support for memory based operations:
- Buffers can be allocated following 6 allocation modes with any granularity or address alignment
- Buffers can be inserted by user (non-overlapping)
- Buffers can be deallocated either by address or by handle
- Buffers can be searched for in the memory space by address or by handle
- Buffers support payload, which can be assigned by the user, randomly generated, read and compared.
- Implements a fast buffer search algorithm
Beside these features YAMM provides debug facilities (e.g. memory map dump, usage statistics) and it is easy to integrate it with existing verification environments.
Yet Another Memory Manager (YAMM) is a SystemVerilog library that provides support for memory based operations:
- Buffers can be allocated following 6 allocation modes with any granularity or address alignment
- Buffers can be inserted by user (non-overlapping)
- Buffers can be deallocated either by address or by handle
- Buffers can be searched for in the memory space by address or by handle
- Buffers support payload, which can be assigned by the user, randomly generated, read and compared.
- Implements a fast buffer search algorithm
Beside these features YAMM provides debug facilities (e.g. memory map dump, usage statistics) and it is easy to integrate it with existing verification environments.
SystemVerilog Assertions(SVA) play a central role in functional verification of protocols, encompassing feature checking and coverage. In order to benefit from assertion advantages (fast, synthesizable, nonintrusive, coverable), we must verify that they pass or fail as described by the protocol specification. In turn this requires to implement the sequences of stimuli that properly trigger the assertion (making it pass or fail) and checks to ensure its correct behavior under the given conditions. We developed the SVAUnit framework with three objectives in mind:
- decouple SVA test logic from SVA definition
- simplify the creation of stimuli/checkers that validate the SVA
- simplify test and stimuli maintenance
SVAUnit is a simulator independent, UVM compliant package that combines the unit testing paradigm of the software world with the powerful feature of assertions from SystemVerilog.
SystemVerilog Assertions(SVA) play a central role in functional verification of protocols, encompassing feature checking and coverage. In order to benefit from assertion advantages (fast, synthesizable, nonintrusive, coverable), we must verify that they pass or fail as described by the protocol specification. In turn this requires to implement the sequences of stimuli that properly trigger the assertion (making it pass or fail) and checks to ensure its correct behavior under the given conditions. We developed the SVAUnit framework with three objectives in mind:
- decouple SVA test logic from SVA definition
- simplify the creation of stimuli/checkers that validate the SVA
- simplify test and stimuli maintenance
SVAUnit is a simulator independent, UVM compliant package that combines the unit testing paradigm of the software world with the powerful feature of assertions from SystemVerilog.
SystemVerilog Assertions(SVA) play a central role in functional verification of protocols, encompassing feature checking and coverage. In order to benefit from assertion advantages (fast, synthesizable, nonintrusive, coverable), we must verify that they pass or fail as described by the protocol specification. In turn this requires to implement the sequences of stimuli that properly trigger the assertion (making it pass or fail) and checks to ensure its correct behavior under the given conditions. We developed the SVAUnit framework with three objectives in mind:
- decouple SVA test logic from SVA definition
- simplify the creation of stimuli/checkers that validate the SVA
- simplify test and stimuli maintenance
SVAUnit is a simulator independent, UVM compliant package that combines the unit testing paradigm of the software world with the powerful feature of assertions from SystemVerilog.

SystemVerilog Assertions(SVA) play a central role in functional verification of protocols, encompassing feature checking and coverage. In order to benefit from assertion advantages (fast, synthesizable, nonintrusive, coverable), we must verify that they pass or fail as described by the protocol specification. In turn this requires to implement the sequences of stimuli that properly trigger the assertion (making it pass or fail) and checks to ensure its correct behavior under the given conditions. We developed the SVAUnit framework with three objectives in mind:
- decouple SVA test logic from SVA definition
- simplify the creation of stimuli/checkers that validate the SVA
- simplify test and stimuli maintenance
SVAUnit is a simulator independent, UVM compliant package that combines the unit testing paradigm of the software world with the powerful feature of assertions from SystemVerilog.
Verification of high computational algorithmic RTL (e.g. digital signal processing) requires complex mathematical models that are hard to implement and slow to run in any of the existing hardware verification languages. Using numerical computing languages (e.g. Octave, Matlab) to code these models will dramatically speed up the verification sign-off by reuse of mathematical functions (e.g. predefined DSP functions) that are already verified. This also has a low risk of algorithm implementation bugs and guarantees optimal implementation for maximum simulation performance.
This paper illustrates typical usage of external mathematical models inside the verification environment using SystemVerilog as the verification language and Octave, an open source sibling of Matlab, as the numerical modeling language.

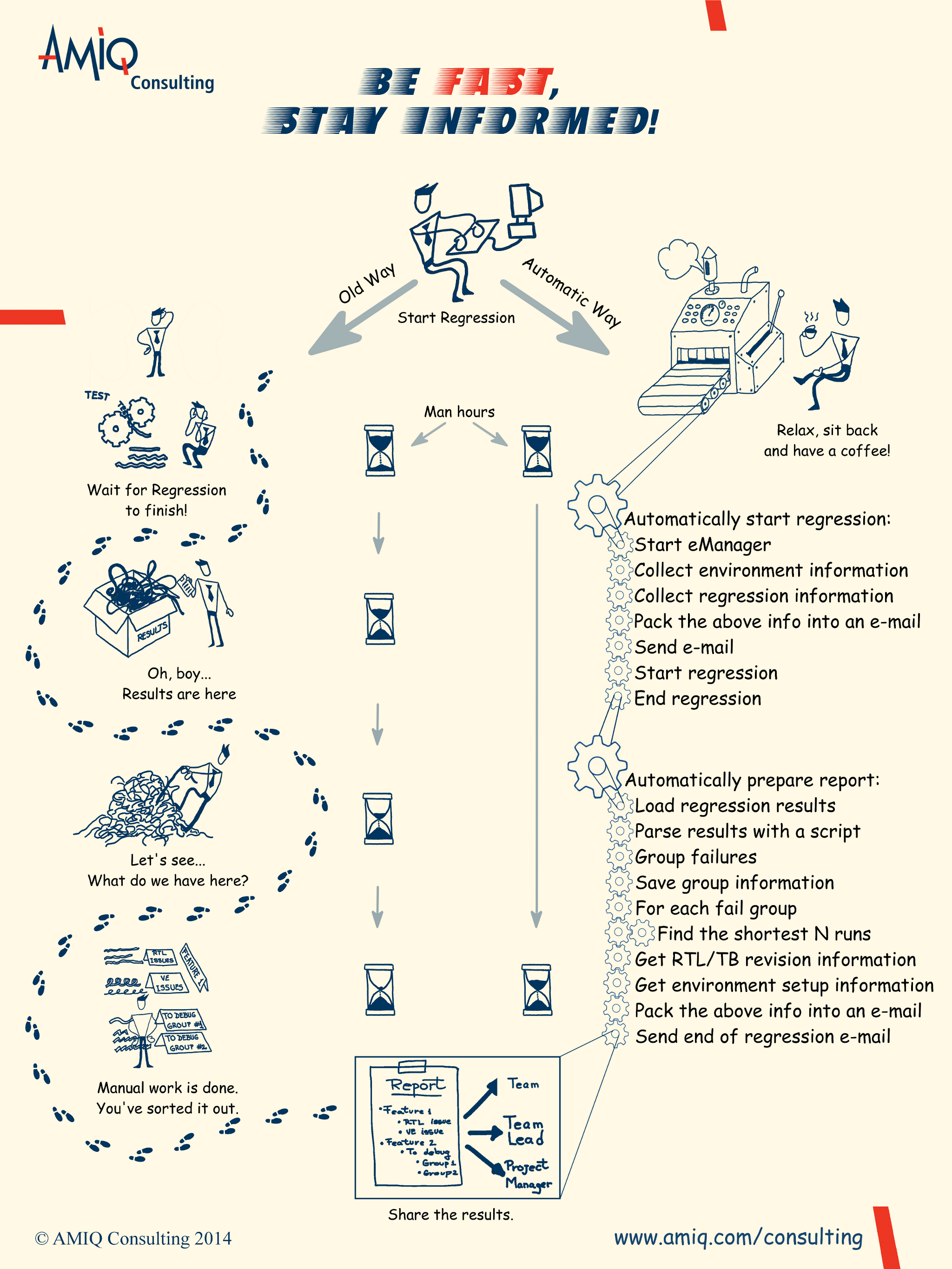
We do pre-silicon verification in multiple iterations, each iteration including at least a regression. Regressions consume a great deal of HW resources (e.g. CPU time) and SW resources (e.g. licenses) and… a lot of human effort. This is what usually happens when we run a regression: we aim to reduce the time spent in regression analysis, especially when we run regressions at a fast pace, for example overnight. We want to see the results in a simple, easy to read report, as soon as possible. We are eager to start debugging issues immediately, instead of aggregating and organizing those tons of information resulting from running a regression. We expect everyone in the team to keep up to date on the regression status with virtually no effort. And in the long run, we want to have a history of regression’s progress.
This poster shows a different way of dealing with these challenges using practical regression automation scripts. The scripts can help your team to save a lot of time and deal in an effective way with the regression results.
If you want to cover a bus activity you can either use bit toggling or define coverage ranges as power-of-2 intervals. As bit toggling is not very relevant (can be covered very quickly in one transition from 0 to MAX_VALUE) the second option is preferred. But using power-of-2 coverage creates another problem: coverage intervals are uneven and covering the smaller bins takes a lot of time. In large projects it can take weeks of regressions time to fill all of them.
This poster illustrates how the stimuli generation can be tweaked so that the smaller bins are hit just as often as the larger ones.
Functional verification using co-emulation has seen a growing trend due to its main advantage: testbench acceleration. Co-emulation requires two main things: (1) a connection between the host machine running the testbench and the hardware platform where the design is synthesized, and (2) a software component for interacting with the design. Most currently available solutions for achieving a complete co-emulation environment are proprietary.
This paper describes an Open-source Framework for Co-emulation (OFC) used for communication between a UVM-SystemVerilog testbench and a design emulated on the FPGA logic of a PYNQ board. The OFC framework is split into two main components: a TCP socket-based client-server connection and a Python component that interacts with the FPGA using the API provided by Xilinx for the PYNQ board. Owing to its modular implementation, the two components can be used either together or separately, depending on the user’s needs.
AMIQ Consulting developed the FC4SC library to complement existing C++ and SystemC libraries with the coverage collection that at the center of any modeling and verification project. Functional coverage lies at the core of semiconductor functional verification as the primary metric to assess quality and track the progress of the entire verification process. FC4SC provides mechanisms for functional coverage definition, collection, and reporting. It can be used in any application compliant with the C++ standard, starting with C++11, including SystemC models.
The primary use for the library is to measure the level of exercise of C++/SystemC verification models or C++ applications, checking which features were tested and which parameters were used during the test runs. Verification engineers can augment an existing C++/SystemC project with functional coverage to assess the quality and diversity of test suites. With this library, SystemC/C++ projects have an accurate way to track level of feature exercise and, therefore, the overall verification progress.
The FC4SC library is designed to interoperate with other tools and technologies, providing an application programming interface (API) that closely resembles functional coverage definition and usage defined by the IEEE 1800-2017 SystemVerilog standard. The collected data is saved in the Accellera Unified Coverage Interoperability Standard (UCIS) format for future interoperability with other coverage tools. Users can generate reports showing coverage holes, partially covered coverage bins, and other coverage analysis metrics.
Functional verification using co-emulation has seen a growing trend due to its main advantage: testbench acceleration. Co-emulation requires two main things: (1) a connection between the host machine running the testbench and the hardware platform where the design is synthesized, and (2) a software component for interacting with the design. Most currently available solutions for achieving a complete co-emulation environment are proprietary.
This paper describes an Open-source Framework for Co-emulation (OFC) used for communication between a UVM-SystemVerilog testbench and a design emulated on the FPGA logic of a PYNQ board. The OFC framework is split into two main components: a TCP socket-based client-server connection and a Python component that interacts with the FPGA using the API provided by Xilinx for the PYNQ board. Owing to its modular implementation, the two components can be used either together or separately, depending on the user’s needs.
6.1 Portable Stimulus Driven SystemVerilog/UVM Verification Environment for the Verification of a High-capacity Ethernet Communication Endpoint
The scope of this paper is to present the steps taken and the challenges faced when using Portable Stimulus(PSS) as an abstraction layer on top of a SystemVerilog/UVM verification environment. The goal is the verification of a highly configurable, high-speed, communication endpoint, covering complex network scenarios and system-level corner cases. PSS is used in conjunction with SystemVerilog/UVM to increase verification efficiency by avoiding “scenario flooding” and keep a tight control of the verification space. All stimuli are defined in the test-bench and they are used to construct directed/random scenarios by utilizing a PSS generation model. The flow of the project in this case requires the SV/UVM VE to keep up with the guidelines for reusability while having an architecture that is compliant with the PSS mechanics of scenario generation. The paper addresses the possible issues and good practices discovered while implementing this verification strategy.
Functional Coverage for SystemC(FC4SC) is a C++11 library that provides support for functional coverage collection by SystemC/C++ applications:
- SystemVerilog-like functional coverage constructs
- Functional coverage inspection API
- UCIS database support
- Coverage databse merge utilities
- HTML/JavaScript coverage report
Yet Another Memory Manager (YAMM) is a SystemVerilog library that provides support for memory based operations:
- Buffers can be allocated following 6 allocation modes with any granularity or address alignment
- Buffers can be inserted by user (non-overlapping)
- Buffers can be deallocated either by address or by handle
- Buffers can be searched for in the memory space by address or by handle
- Buffers support payload, which can be assigned by the user, randomly generated, read and compared.
- Implements a fast buffer search algorithm
Beside these features YAMM provides debug facilities (e.g. memory map dump, usage statistics) and it is easy to integrate it with existing verification environments.
Yet Another Memory Manager (YAMM) is a SystemVerilog library that provides support for memory based operations:
- Buffers can be allocated following 6 allocation modes with any granularity or address alignment
- Buffers can be inserted by user (non-overlapping)
- Buffers can be deallocated either by address or by handle
- Buffers can be searched for in the memory space by address or by handle
- Buffers support payload, which can be assigned by the user, randomly generated, read and compared.
- Implements a fast buffer search algorithm
Beside these features YAMM provides debug facilities (e.g. memory map dump, usage statistics) and it is easy to integrate it with existing verification environments.
Yet Another Memory Manager (YAMM) is a SystemVerilog library that provides support for memory based operations:
- Buffers can be allocated following 6 allocation modes with any granularity or address alignment
- Buffers can be inserted by user (non-overlapping)
- Buffers can be deallocated either by address or by handle
- Buffers can be searched for in the memory space by address or by handle
- Buffers support payload, which can be assigned by the user, randomly generated, read and compared.
- Implements a fast buffer search algorithm
Beside these features YAMM provides debug facilities (e.g. memory map dump, usage statistics) and it is easy to integrate it with existing verification environments.
SystemVerilog Assertions(SVA) play a central role in functional verification of protocols, encompassing feature checking and coverage. In order to benefit from assertion advantages (fast, synthesizable, nonintrusive, coverable), we must verify that they pass or fail as described by the protocol specification. In turn this requires to implement the sequences of stimuli that properly trigger the assertion (making it pass or fail) and checks to ensure its correct behavior under the given conditions. We developed the SVAUnit framework with three objectives in mind:
- decouple SVA test logic from SVA definition
- simplify the creation of stimuli/checkers that validate the SVA
- simplify test and stimuli maintenance
SVAUnit is a simulator independent, UVM compliant package that combines the unit testing paradigm of the software world with the powerful feature of assertions from SystemVerilog.
SystemVerilog Assertions(SVA) play a central role in functional verification of protocols, encompassing feature checking and coverage. In order to benefit from assertion advantages (fast, synthesizable, nonintrusive, coverable), we must verify that they pass or fail as described by the protocol specification. In turn this requires to implement the sequences of stimuli that properly trigger the assertion (making it pass or fail) and checks to ensure its correct behavior under the given conditions. We developed the SVAUnit framework with three objectives in mind:
- decouple SVA test logic from SVA definition
- simplify the creation of stimuli/checkers that validate the SVA
- simplify test and stimuli maintenance
SVAUnit is a simulator independent, UVM compliant package that combines the unit testing paradigm of the software world with the powerful feature of assertions from SystemVerilog.
SystemVerilog Assertions(SVA) play a central role in functional verification of protocols, encompassing feature checking and coverage. In order to benefit from assertion advantages (fast, synthesizable, nonintrusive, coverable), we must verify that they pass or fail as described by the protocol specification. In turn this requires to implement the sequences of stimuli that properly trigger the assertion (making it pass or fail) and checks to ensure its correct behavior under the given conditions. We developed the SVAUnit framework with three objectives in mind:
- decouple SVA test logic from SVA definition
- simplify the creation of stimuli/checkers that validate the SVA
- simplify test and stimuli maintenance
SVAUnit is a simulator independent, UVM compliant package that combines the unit testing paradigm of the software world with the powerful feature of assertions from SystemVerilog.
SystemVerilog Assertions(SVA) play a central role in functional verification of protocols, encompassing feature checking and coverage. In order to benefit from assertion advantages (fast, synthesizable, nonintrusive, coverable), we must verify that they pass or fail as described by the protocol specification. In turn this requires to implement the sequences of stimuli that properly trigger the assertion (making it pass or fail) and checks to ensure its correct behavior under the given conditions. We developed the SVAUnit framework with three objectives in mind:
- decouple SVA test logic from SVA definition
- simplify the creation of stimuli/checkers that validate the SVA
- simplify test and stimuli maintenance
SVAUnit is a simulator independent, UVM compliant package that combines the unit testing paradigm of the software world with the powerful feature of assertions from SystemVerilog.
Verification of high computational algorithmic RTL (e.g. digital signal processing) requires complex mathematical models that are hard to implement and slow to run in any of the existing hardware verification languages. Using numerical computing languages (e.g. Octave, Matlab) to code these models will dramatically speed up the verification sign-off by reuse of mathematical functions (e.g. predefined DSP functions) that are already verified. This also has a low risk of algorithm implementation bugs and guarantees optimal implementation for maximum simulation performance.
This paper illustrates typical usage of external mathematical models inside the verification environment using SystemVerilog as the verification language and Octave, an open source sibling of Matlab, as the numerical modeling language.
We do pre-silicon verification in multiple iterations, each iteration including at least a regression. Regressions consume a great deal of HW resources (e.g. CPU time) and SW resources (e.g. licenses) and… a lot of human effort. This is what usually happens when we run a regression: we aim to reduce the time spent in regression analysis, especially when we run regressions at a fast pace, for example overnight. We want to see the results in a simple, easy to read report, as soon as possible. We are eager to start debugging issues immediately, instead of aggregating and organizing those tons of information resulting from running a regression. We expect everyone in the team to keep up to date on the regression status with virtually no effort. And in the long run, we want to have a history of regression’s progress.
This poster shows a different way of dealing with these challenges using practical regression automation scripts. The scripts can help your team to save a lot of time and deal in an effective way with the regression results.
If you want to cover a bus activity you can either use bit toggling or define coverage ranges as power-of-2 intervals. As bit toggling is not very relevant (can be covered very quickly in one transition from 0 to MAX_VALUE) the second option is preferred. But using power-of-2 coverage creates another problem: coverage intervals are uneven and covering the smaller bins takes a lot of time. In large projects it can take weeks of regressions time to fill all of them.
This poster illustrates how the stimuli generation can be tweaked so that the smaller bins are hit just as often as the larger ones.
Data Types
Integer data types
| Type | Description |
|---|---|
| bit | 2-state data type, user-defined vector size representing unsigned data |
| byte | 8 bit 2-state integer representing signed data or ASCII character |
| shortint | 16 bit 2-state integer representing signed data |
| int | 32 bit 2-state integer representing signed data |
| longint | 64 bit 2-state integer representing signed data |
| logic | 4-state data type, user-defined vector size, unsigned data |
| reg | 4-state data type, user-defined vector size, unsigned data |
| wire | Used to connect different elements in a design. They can be read or assigned, but no values can be stored in them. |
| integer | 32 bit 4-state integer representing signed data |
| time | 64 bit 4-state integer representing signed data |
Real data types
| Type | Description |
| shortreal | 32 bit, single-precision, floating-point number |
| real | 64 bit, single-precision, floating-point number |
| realtime | 64 bit, single-precision, floating-point number |
Enum data types
Declares a user-defined enumerated type having a set of explicitly named values. Syntax:
enum data_type {item[0], item[1], ...} enum_type_name;
| Defaults | Description |
| data_type | If not specified data type defaults to int.
Example: |
| item[0] value | If not specified the first item in an enumerated list will be represented as 0 |
| item[n] value | If not specified the n-th item in an enumerated list will be represented as item[n-1] + 1 |
| Method | Description |
| first() | Returns the first value of an enumeration |
| last() | Returns the last value of an enumeration |
| next(N) | Return the N-th next value, wrapping to the beginning if needed. Default N = 1. |
| prev(N) | Return the N-th previous value, wrapping to the end if needed. Default N = 1. |
| num() | Returns the number of values in the enum |
Struct data types
| Type | Description |
| Unpacked (default) | Syntax:
Access to a certain field: <struct_name>.<field_name> |
| Packed | Syntax:
Members of a packed structure can be accessed either by their name, or by indexing a vector. By default the first field will be the leftmost item in the vector: Example: In this case my_struct[0] is my_struct.data[0] |

Dynamic array
A dynamic array is an unpacked array whose size can be set or changed at runtime. Syntax:
type array_name[];
array_name = new[expression1](expression2);
expression2 is an optional initialization of the array
| Method | Description |
| new[expression] | Constructor that sets the size of the dynamic array and initializes its elements
Example: |
| size() | Returns the current size or 0 if the array is not created or if it was deleted. Example:
|
| delete() | Empties the array, resulting in a zero-sized array
Example: |
Queue data type
Syntax:
<type> my_queue[$:max_size]; //where max_size is optional
Example:
int q_int[$];
my_class my_q[$:5]; // accepts maximum 6 elements
| Method | Description |
| size() | Returns current size of the queue |
| insert(i,d) | Inserts item d at index i |
| delete(i) | Deletes item at index i, if index is omitted, deletes queue |
| pop_front() | Reads and removes the item from the front of the queue |
| pop_back() | Reads and removes the item from the back of the queue |
| push_front(d) | Adds item d to front of the queue |
| push_back(d) | Adds item d to back of the queue |
Casting
Static Cast
In a static cast, if the expression is assignment compatible with the casting type, then the cast shall return the value of a variable of the casting type. Syntax:
casting_type‘(expression)Example 1:
shortint a;
int b;
b = int’(a);
Example 2:
logic[7:0] register;
register = signed’(4’b1100) // register = -4
Example 3:
shortint a;
int b;
b = a; // implicit cast
Dynamic Cast
Used to assign values to variables that might not ordinarily be valid because of differing data types. Syntax:
function int $cast(destination, source)
task $cast(destination, source)
If the assignment is invalid, a task will generate a runtime error, while the function will return 0.
typedef enum(idle,busy,pause,done) state;
state current_state;
if(!$cast(current_state,6)
$display(“Error in cast”);
Classes
Class Declaration Syntax:
class my_class;
constructor
local/static/protected items
Methods/method prototypes
endclassClass Instance Syntax:
my_class obj; // declare an object of class my_class
Obj = new(); // initialize variable to a new allocated object of class my_class
Relevant keywords
| Keyword | Description |
| static | A static class field shares its value with all instances of the class A static method can only access static properties, but it can be called even when no class instances exist by using class name and the scope resolution operator. Example:
|
| this | The this keyword gives unambiguous access to members of the current class instance
Example: |
| super | The super keyword gives unambiguous access to members of the parent class of the calling object.
Example: |
| virtual | A virtual class is an abstract class which can only be inherited, but not instantiated. |
| const | Class properties can be made read-only by using a const declaration.
Example: |
Encapsulation
| Keyword | Description |
| local | Used to specify that class members are only visible within the class where they were declared.
|
| protected | Used to specify that class members are only visible within the class where they were declared and any subclasses.
|
Inheritance
| Keyword | Description |
| extends | It is used to create a new class that inherits the members of a base class.
|
Polymorphism
| Keyword | Description |
| virtual | Virtual (class method) is used to define basic polymorphic constructs. A virtual method is used to override a method in all of its base classes.
|
Parameterized classes
Class implementation can be customized by using class parameters. Example:
class vector#(int size = 1)
bit [size -1 : 0] a;
endclass
class stack#(type T = int)
local T items[];
...
endclassInstantiation:
vector#(10) a = new();
stack#(real) b = new();
Interface class
The interface class is a class that can be viewed as having a common set of behaviours. An interface class shall contain only pure virtual methods, type declarations and parameter declaration, all other blocks and declarations shall not be allowed.
Syntax:
interface class class_name [extends interface_class_type]
// pure virtual methods
// parameters
// type declarations
endclassA class may implement one or more interface classes.
Example:
interface class set_data#(type SET_TYPE = logic)
pure virtual function void set(SET_TYPE a);
endclass
interface class get_data#(type GET_TYPE = logic)
pure virtual function void get();
endclass
class my_queue#(type T =logic, DEPTH = 1);
T q[$:DEPTH - 1]
virtual void function delete_queue();
q.delete();
endfunction
enclass
class fifo (type T = logic, DEPTH = 1)
extends my_queue#(T, DEPTH)
implements set_data#(T), get_data#(T);
virtual function void set(T a);
q.push_back(a);
endfunction
virtual function void get();
q.pop_front();
endfunction
endclass
Copy-Constructor
The copy constructor is a constructor which creates an object by initializing it with an object of the same class, which has been created previously. Example:
class my_class;
int x,y;
function new();
// simple constructor
endfunction
function new(my_class obj);
this.x = obj.x;
this.y = obj.y;
endfunction
endclass
Operators
| Symbol | Description |
| = | Binary assignment operator |
| += -= /= *= | Binary arithmetic assignment operator |
| %= | Binary arithmetic modulus assignment operator |
| &= |= ^= | Binary bitwise assignment operator |
| >>= <<= | Binary logical shift assignment operator |
| >>>= <<<= | Binary arithmetic shift assignment operator |
| + – * / ** | Binary arithmetic operators |
| % | Binary arithmetic modulus operators |
| & | ^ | Binary bitwise operators |
| >> << | Binary shift operators |
| ! | Unary logical negation operator |
| ~ & ~& | ~|
^ ~^ |
Unary logical reduction operator
Example: &y will return the result of an AND operation between all the bits of y |
| && || | Binary logical operations |
| < > <= >= | Binary relational operation |
| == != | Binary logical equality operators |
| === !== |
Binary case equality operators.
Unlike logical equality operator, this operators can identify x and z. |
| ++ — | Unary increment/decrement operation |
Package
package my_pacakge;
//classes
//variables
//functions
//structs
//etc..
endpackageWildcard import – Imports all symbols within the package
import my_package::*; Explicit import – Imports only the mentioned symbol from the package
import my_package::my_symbol;
Processes
Parallel processes:
fork
begin
//Task 1
end
begin
//Task 2
end
begin
//Task n
end
join_keyword| join_keyword | Description |
| join | The fork completes when all tasks complete |
| join_any | The fork completes when the first task is completed |
| join_none | The fork completes immediately |
Verification Features
Randomizations
| Declaration | Description |
| rand | Used in class declaration to specify that a class property is a random variable with an uniform distribution
|
| randc | Used in class declaration to specify that a class property is a random variable with an cyclic distribution
X can take on values in rage of 0 to 3. Randomize will compute an initial random permutation of the range values and return them in order on successive calls. Initial permutation 0,2,1,3 next permutation 2,3,0,1 The values will be generated in the following order 0,2,1,3,2,3,0,1. |
| Function | Description |
| std::randomize() | It is a built-in function used to randomize local variables or class properties
The randomize function will return 1 if the randomization was successful or 0 otherwise. |
| randomize(class method) | Built-in method used to randomize all properties declared with rand and randc. The properties that are not declared rand or randc can still be randomized if they are passed as arguments.
Cannot be overridden! |
| pre_randomize() | Built-in method that is called by the randomize() method before the objects are randomized.
|
| post_randomize() | Built-in method that is called by the randomize() method after the objects are randomized.
|
Constraint
Used in class-based randomization, restricting values to specific ranges.
Syntax:
constraint name_c {<constraint_item>;}
class my_class;
rand int random_value;
constraint random_value_c{
random_value >= 0;
random_value <= 15;
}
endclass| Constraint item | Description |
| solve..before… | Defines the order of generation for multiple values
Syntax: Example without solve…before…: In this case we have three possible combinations (set,reset) = {(0,0);(0,1);(1,0)} each having a 33% chance of occurring. Example with solve…before…: In this case set is solved first, so (set,reset) = (1,0) has a 50% chance of occurring, instead of 33%. |
| foreach | Used to specify constraints over the elements of an array
|
| soft | Designates a constraint that is to be satisfied unless contradicted by another constraint with an higher priority.
|
| Keyword | Description |
| inside | Comparison operator which is true if an expression is contained within a specific list
|
| dist | Used to define weighted distributions
Syntax: The operator is one of the following
Example: |
| with | Used to specify in-line constraints for randomization.
Syntax: |
| Operators and methods | Description |
| -> | Implication operator used for conditional constraints. It is similar to the if construct.
Syntax: Similar to: |
| constraint_mode() task | Used to enable and disable class constraints.
Syntax: |
| constraint_mode() function | Returns the current status of a constraint
Syntax: |
Functional Coverage
Covergroups
Defines probes that sample relevant information from functional coverage and defines how coverage results will be reported.
covergroup name_cg <coverage event>
//coverpoints
//cross
endgroup<coverage event> could be:
- @(block_event) example: @(posedge clk)
- with function sample([port_list])
Initialization code:
name_cg = new();
name_cg.set_inst_name(“my_name”);
Coverpoints
Identifies a variable that will be tracked for coverage
Syntax:
coverpoint variable [iff (boolead_expresion)]
{ /* bins */ }If no bins are defined , the coverpoint creates an automatic bin for every value of the variable.
covergroup my_cg with function sample(bit[31:0] addr)
coverpoint addr iff(rst_n);
{
bins null_addr = {0};
bins valid_addr = {[2:20]};
}
endgroup
Cross
Correlates bins from two or more coverpoints so that an inter-variable value relationship can be explored.
Syntax:
cross expression1 , expression2, … expression n [iff (boolean expression)];
// or
cross expression1 , expression2, … expression n [iff (boolean expression)]
{ /* user defined cross coverage bins; */ }
covergroup my_cg with function sample(bit signal1,bit signal2)
coverpoint signal1;
coverpoint signal2;
cross signal1, signal2;
endgroup
Transitions
| Type | Description |
| Sequence | A transition from valueA to valueB is defined as such: valueA => valueB 0 => 1 |
| Set | Syntax:
|
| Consecutive repetitions [*n] | Syntax:
|
| Range of repetitions [*n:m] | Syntax:
Example: |
| Goto repetition[->n] | Syntax:
Examples: Where … is any transition that does not contain the value 1 Notice that the last transition happens immediately after the second 1 to 1 transition. |
| Nonconsecutive repetition[=n] | Syntax:
Example: Where … is any transition that does not contain the value 1 Notice that the transition following the nonconsecutive repetition may occur after any number of transition as long as the value 1 doesn’t occur again. |
Bins
| Type of bins | Description |
| bins | Allows explicit named coverage bins to be defined and a range of values to be tracked for each bins.
|
| wildcard bins | Allows x,z and ? as wildcard values in bins definition
|
| illegal_bins | Identifies that a certain range of values are illegal. |
| ignore_bins | Identifies that a certain range of values are excluded from coverage. |
| default | Default bins are used for all values not covered in other bin ranges. Default bins are not tracked in cross-coverage.
|
Assertions
| Type | Description |
| Immediate assertions | Syntax:
|
| Concurrent assertions | Are SVA directives used to verify that a property holds. Syntax:
|
| Cover | Is SVA directive used to verify that a property occurs during simulation. Syntax:
|
SVA Syntax
Sequences
| Sequence Type | Description |
| Temporal delay ## with integer |
|
| Temporal delay ## with range |
|
| Consecutive repetition [*m] or range [*n:m] | Where n,m re natural numbers, m>n>=1. The $ sign can be used to represent infinity
|
| Non-consecutive repetition [=n], [=n:m] | Example 1:
This is a shortcut for the following sequence Example 2: |
| Goto non-consecutive repetition [->n], [->n:m] | Example 1:
The difference between the two non-consecutive repetition is that the pattern Observe that signal_1 is matched before returning to the LOW state. Example 2: |








Properties
| Operator | Description |
| Overlapping sequence implication operator |-> | Syntax:
sequence_2 will start in the same clock cycle in which sequence_1 will end Example:
|
| Non-overlapping sequence implication operator |=> | Syntax:
sequence_2 will start one clock cycle after sequence_1 has ended Observation! |


System functions
| Function | Description |
| $onehot(signal) | Returns true if only one bit of the signal HIGH |
| $onehot0(signal) | Returns true if only one bit of the signal is LOW |
| $isunknown(signal) | Returns true if at most one bit of the signal is X or Z |
| $rose(signal) | Returns true if the signal has changed value to 1 in the current evaluation cycle |
| $fell(signal) | Returns true if the signal has changed value to 0 in the current evaluation cycle |
| $stable(signal) | Returns true if the signal has the same value as it had in the previous evaluation cycle |
| #past(signal, number_of_cc) | Returns the value of the signal at a previous evaluation cycle specified through the number_of_cc argument |
Design and Verification Blocks
| Block | Description |
| Module | Syntax:
|
| Interface | Syntax:
An interface can have different views by defining modports. Module declaration: |
| Virtual Interface | A virtual interface is a variable that represents an interface instance, providing a mechanism of separating abstract models from the actual RTL implementation. Syntax:
|
SystemVerilog Assertions
| Type | Description |
| Immediate assertions | Syntax:
|
| Concurrent assertions | Are SVA directives used to verify that a property holds. Syntax:
|
| Cover | Is a SVA directive used to verify that a property occurs during simulation. Syntax:
|
SVA Syntax
Property
Declaration:
property my_property[(port0, port1, ...)];
//assertion variable declarations
// property_statement
endproperty| Operator | Description |
| Overlapping sequence implication operator |-> | Syntax:
sequence2 will start in the same clock cycle in which sequence1 will end
|
| Non-overlapping sequence implication operator |=> | Syntax:
sequence2 will start one clock cycle after sequence1 has ended
|
| not | Syntax:
|
| and | Syntax:
|
| or | Syntax:
|
| until | Syntax:
|
| until_with | Syntax:
my_property evaluates to true if property1 evaluates to true for every clock cycle beginning with the starting point, and finishing the same cycle when property2 starts to evaluate to true. Example:
|
| disable iff | Syntax:
Causes the assertion checking to be terminated if the boolean condition is evaluated to TRUE. |




Sequences
Declaration:
sequence my_sequence [(port0, port1, ...)]
//assertion variable declarations
//sequence expressions
endsequence| Operator | Description |
| Temporal delay ## with integer |
|
| Temporal delay ## with range |
Delay = 0 |
| Consecutive repetition [*m] or range [*n:m], [*],[+] | Where n,m are natural numbers, m>n>=1. The $ sign can be used to represent infinity. Example:
The length of signal1 is 1 clock cycle Abbreviations:
|
| Non-consecutive repetition [=n], [=n:m] | Example 1:
This is a shortcut for the following sequence Example 2:
|
| Goto non-consecutive repetition [->n], [->n:m] | Example 1:
The difference between the two non-consecutive repetition is that the pattern matching is finished after the last active pulse.
Observe that signal1 is matched before returning to the LOW state Example 2:
|
| and | Syntax:
Example:
The evaluation starts at the same clock time (if each sequence has it’s own clock, then the AND starts at the first clocking event of each sequence), but it is not necessary to finish at the same time. The and sequence fails to match when any of the sequences fail to match. |
| or | Syntax:
Example:
The result of OR-ing two sequence is a match when at least one of the two sequences is a match. |
| intersect | It is similar to the and operator, except that the the two sequences must end at the same time. Syntax:
Example:
|
| within | Syntax:
Example:
A match must satisfy the following conditions:
|
| throughout | The throughout operator specifies that a signal must hold throughout a sequence. Syntax: signal throughout seq Example:
|













| Method | Description |
| first_match | Used to specify that only the first sequence match is considered from a range of possible matches, the rest being discarded. Syntax:
Example: my_seq generates an infinite number of threads and an infinite number of matches. To prevent unexpected errors the first_match method is used to ensure that only the first of multiple matches is considered. Implicit first_match:
Example: Possible match2
The first match of a consequent causes the property to hold and to successfully complete the Required first match:
Each thread generated by an antecedent must match to cause the property to hold. If a thread Successful assertion with first_match |
| triggered | Used to test if the end point of a sequence was reached. An end point is a boolean expression that represents the evaluation of a thread at its last clock cycle. Syntax:
Example:
|








Variables
Declaration of a sequence:
sequence my_sequence[(Formal arguments)]
//Assertion Variable Declaration
endsequence| Types | Description | ||||||||||||
| Legal Types | Legal local variable types
|
||||||||||||
| llegal types | Illegal local variable types
|
||||||||||||
| Initialization | Rules:
Fa_signal will be initialized first with the preponed value of signal1, then avd_signal will be initialized. Initialization of Formal Arguments:
|
||||||||||||
| Assignments | Local variables can be assigned within the sequence matched item list, each variable being separated from each other by using comma in the parentheses. The variables are assigned in order of appearance. Non-local variables cannot be directly assigned in a sequence, it is necessary to assigned them through function calls. Example:
Assignments can be used in repetitions: |
||||||||||||
| User-defined repetitions | Local variables cannot be used in temporal ranges, but they can be used as counters for user-defined repetitions or delays. Illegal use of local variables
Legal use of local variables |
||||||||||||
| Passing and binding Local Variables to instance of a subsequence | Method 1: Using an untyped formal argument
my_seq is equivalent to:
Method 2: Using a typed formal argument In this case the end point of binded_seq(s) must occur 1 clock cycle after signal2 was asserted. The starting point of binded_seq(s) is before signal2 is asserted. |
||||||||||||
| Using and, or, intersect with local variables | Using local variables on parallel “or” Threads. The or operand generates two concurrent threads, each thread having separate copies of the local variables. If a local variable is set on one thread, the other thread wouldn’t be able to access it.  Using local variables on parallel “and”/”intersect” Threads. The and/intersect operands generate two concurrent threads, each having separate copies of the local variables. At the end of the evaluations, the two threads are merged into one. This will create problems when a local variable is assigned in both threads, and later used after the threads are merged.
Example: In this case we have an illegal assignment of signal_cp in both threads. |

{kind=link}
{kind=link}
System functions
| Function | Description |
| $onehot(signal) | Returns true if only one bit of the signal HIGH |
| $onehot0(signal) | Returns true if only one bit of the signal is LOW |
| $isunknown(signal) | Returns true if at most one bit of the signal is X or Z |
| $rose(signal) | Returns true if the signal has changed value to 1 in the current evaluation cycle |
| $fell(signal) | Returns true if the signal has changed value to 0 in the current evaluation cycle |
| $stable(signal) | Returns true if the signal has the same value as it had in the previous evaluation cycle |
| $past(signal, number_of_cc) | Returns the value of the signal at a previous evaluation cycle specified through the number_of_cc argument |
Recommended Articles – December 2022
![]() AMIQ is a constant presence at DVCon Europe conference (both AMIQ Consulting and AMIQ EDA). If you haven’t been able to attend the conference or you’ve missed one presentation which was of interest for you, go ahead and read the highlights from our perspective. The highlights article is a joined effort of my colleagues and gives you the pulse from our verification community: Highlights of DVCon EU 2022
AMIQ is a constant presence at DVCon Europe conference (both AMIQ Consulting and AMIQ EDA). If you haven’t been able to attend the conference or you’ve missed one presentation which was of interest for you, go ahead and read the highlights from our perspective. The highlights article is a joined effort of my colleagues and gives you the pulse from our verification community: Highlights of DVCon EU 2022
![]() In design and verification we often use these two terms: latency and throughput. Here is a short article from Cadence to clarify on their meaning: Understanding Latency versus Throughput
In design and verification we often use these two terms: latency and throughput. Here is a short article from Cadence to clarify on their meaning: Understanding Latency versus Throughput
![]() Verifying status registers in an RTL design might get tricky. You normally need to consider a so called grey area/zone verification, where the expected value is not always the last update one. Cristian Slav, has detailed for e-language on how to use the built in features of vr_ad register model in order to achieve this kind of verification. Read more in his article: The Hidden Feature of vr_ad: Gray Zone Comparison
Verifying status registers in an RTL design might get tricky. You normally need to consider a so called grey area/zone verification, where the expected value is not always the last update one. Cristian Slav, has detailed for e-language on how to use the built in features of vr_ad register model in order to achieve this kind of verification. Read more in his article: The Hidden Feature of vr_ad: Gray Zone Comparison
![]() For those of you using GIT, here is a short article explaining why you should use the git rebase command: Git Rebase Explained
For those of you using GIT, here is a short article explaining why you should use the git rebase command: Git Rebase Explained
This is the last recommended article for 2022. Change and unrest seems to define the current world. I challenge you to find the source of peace so that it may settle inside you and from there to radiate to the people around you and to the whole world. The world can rest and find peace only if every one of us, starting with myself becomes thankful, joyful, humble, faithful, merciful, forgiving, caring and loving.
I wish you a Merry Christmas and a Happy New Year. Enjoy your holidays.
See you in 2023!

Recommended Articles – September 2022
![]() Cristian / CFSVision has enhanced the standard UVM messaging with a new `uvm_infos macro that accepts multiple message tags. `uvm_infos enhances the fine tuning of message streams, which in turn increases the debug focus while shortening the debug time.
Cristian / CFSVision has enhanced the standard UVM messaging with a new `uvm_infos macro that accepts multiple message tags. `uvm_infos enhances the fine tuning of message streams, which in turn increases the debug focus while shortening the debug time.
![]() Our industry relies on commercial EDA tool chains to get from idea to physical implementation. The Ultimate Guide to Open Source EDA Tools presents an Open Source alternative that covers the full path from design to implementation.
Our industry relies on commercial EDA tool chains to get from idea to physical implementation. The Ultimate Guide to Open Source EDA Tools presents an Open Source alternative that covers the full path from design to implementation.
Recommended Articles – August 2022
![]() Hey, it’s summer and internships are underway. VerilogPro’s posts on Verilog and SystemVerilog might come at hand when you explain various concepts to newbies. His latest post addresses the concept of module (we are a bit late with this one).
Hey, it’s summer and internships are underway. VerilogPro’s posts on Verilog and SystemVerilog might come at hand when you explain various concepts to newbies. His latest post addresses the concept of module (we are a bit late with this one).
![]() We also found a contribution of Lucas Klemmer/Institute for Complex Systems to the OpenSource EDA community: Waveform Analysis Language. WAL provides an interactive command line that allows one to search for signal patterns or do post-simulation processing of waves. One can define the pattern-search function using a LISP-like syntax and apply it on a set of signals. For more information and references I encourage you to read the DAC’22 paper or inspect WAL’s GitHub repo.
We also found a contribution of Lucas Klemmer/Institute for Complex Systems to the OpenSource EDA community: Waveform Analysis Language. WAL provides an interactive command line that allows one to search for signal patterns or do post-simulation processing of waves. One can define the pattern-search function using a LISP-like syntax and apply it on a set of signals. For more information and references I encourage you to read the DAC’22 paper or inspect WAL’s GitHub repo.
Recommended Articles – July 2022
 Elihai Maicas describes how to use SystemVerilog command line to control the value of a SystemVerilog class field and how to enable or disable SystemVerilog constraints. The two LinkedIn posts are a must read for any engineer that wants to add extra-flexibility to the verification environment control. The first post presents how to add hierarchy to an uvm_object class and the second one uses the implementation from the first post in order to turn on/off a constraint-block from the command-line.
Elihai Maicas describes how to use SystemVerilog command line to control the value of a SystemVerilog class field and how to enable or disable SystemVerilog constraints. The two LinkedIn posts are a must read for any engineer that wants to add extra-flexibility to the verification environment control. The first post presents how to add hierarchy to an uvm_object class and the second one uses the implementation from the first post in order to turn on/off a constraint-block from the command-line.
![]() Coaching the next generation of [verification] engineers requires to build work relationships based on trust, communication and shared values. Setting internship expectations is the first thing we do for the internship to start off on the right foot.
Coaching the next generation of [verification] engineers requires to build work relationships based on trust, communication and shared values. Setting internship expectations is the first thing we do for the internship to start off on the right foot.
![]() One of the most important component within a verification environment is the scoreboard. Debugging scoreboards can be very difficult and the worst type of errors are those involving race conditions. Here is a complete and interesting approach on how to avoid race conditions when dealing with data coming from parallel threads. Of course, this is not the only solution/way of dealing with race conditions. But it is the first one which provides so many levels of details, openly in the web.
One of the most important component within a verification environment is the scoreboard. Debugging scoreboards can be very difficult and the worst type of errors are those involving race conditions. Here is a complete and interesting approach on how to avoid race conditions when dealing with data coming from parallel threads. Of course, this is not the only solution/way of dealing with race conditions. But it is the first one which provides so many levels of details, openly in the web.
Recommended Articles – June 2022
![]() FIFOs are among the most commonly used design components inside an RTL. Verifying a FIFO requires using the same approach almost all the time. We can see a pattern in how we verify its functionality. Ovidiu, one of my colleagues, has compiled a list of the most common functional coverage aspects we need to think of when dealing with FIFOs: Functional Coverage Patterns – FIFO
FIFOs are among the most commonly used design components inside an RTL. Verifying a FIFO requires using the same approach almost all the time. We can see a pattern in how we verify its functionality. Ovidiu, one of my colleagues, has compiled a list of the most common functional coverage aspects we need to think of when dealing with FIFOs: Functional Coverage Patterns – FIFO
![]() Working with registers in e-language requires several steps you need to do. Here is a summary of these steps in order to setup vr_ad (the e-language register model): How to Startup vr_ad e Library
Working with registers in e-language requires several steps you need to do. Here is a summary of these steps in order to setup vr_ad (the e-language register model): How to Startup vr_ad e Library
Recommended Articles – May 2022
![]() This year the DVClub conference approached an interesting topic: Alternative Test Bench Architectures. For sure every company has its own way of building test bench architectures. Infineon has presented an architecture in which the Generation is decoupled from the Simulation phase for an IP test. The video presentation can be viewed over here. This architecture has been detailed even further in the second presentation called: ADAS IP Case Study: De-Coupled Generation and Simulation for Functional Verification
This year the DVClub conference approached an interesting topic: Alternative Test Bench Architectures. For sure every company has its own way of building test bench architectures. Infineon has presented an architecture in which the Generation is decoupled from the Simulation phase for an IP test. The video presentation can be viewed over here. This architecture has been detailed even further in the second presentation called: ADAS IP Case Study: De-Coupled Generation and Simulation for Functional Verification
![]() The SystemVerilog language has some pitfalls and not all of us are aware of them. I’ve encountered one particular pitfall in multiple projects. Thus, I’ve decided to raise the awareness of our community by sharing it in the following article: Gotcha: Calling Virtual Functions From SystemVerilog Class Constructor new() Method
The SystemVerilog language has some pitfalls and not all of us are aware of them. I’ve encountered one particular pitfall in multiple projects. Thus, I’ve decided to raise the awareness of our community by sharing it in the following article: Gotcha: Calling Virtual Functions From SystemVerilog Class Constructor new() Method
Recommended Articles – April 2022
![]() After a 4 years pause, Jason Yu, from Intel, wrote a new article on his website Verilog Pro. It is more of a tutorial, about the always block from Verilog/SystemVerilog. I like his writing style and it worth reading. As he puts it in words: ” I have a new goal to create a series of articles to help new engineers transition from “textbook knowledge” to real world knowledge needed to become a digital design engineer“.
After a 4 years pause, Jason Yu, from Intel, wrote a new article on his website Verilog Pro. It is more of a tutorial, about the always block from Verilog/SystemVerilog. I like his writing style and it worth reading. As he puts it in words: ” I have a new goal to create a series of articles to help new engineers transition from “textbook knowledge” to real world knowledge needed to become a digital design engineer“.
![]() Extending a method in e-language is straightforward due to the following constructs: is also, is first, is only. But in certain situations things get a bit unclear. Cristian Slav, posted on his blog an article about how does the return statement work when dealing with method extensions.
Extending a method in e-language is straightforward due to the following constructs: is also, is first, is only. But in certain situations things get a bit unclear. Cristian Slav, posted on his blog an article about how does the return statement work when dealing with method extensions.
![]() A new entry on our list: Michael Green has a blog about verification. My colleagues have spotted this article about the history of constrained random verification and why do we do it in this way. It is a nice introduction for someone who is in the learning stages of verification methodologies.
A new entry on our list: Michael Green has a blog about verification. My colleagues have spotted this article about the history of constrained random verification and why do we do it in this way. It is a nice introduction for someone who is in the learning stages of verification methodologies.
Recommended Articles – March 2022
![]() Initially announced as a face-to-face conference, DVCon US 2022 was held virtually, for one more year in a row. For us in AMIQ, a company based in Romania – Europe, having DVCon US as a virtual conference is an advantage. We were able to attend most, if not all, of the interesting presentations from the conference. My colleague, Andrei Vintila, along with several others, have put together another highlight for this year’s content. If you missed the conference, don’t miss its highlights.
Initially announced as a face-to-face conference, DVCon US 2022 was held virtually, for one more year in a row. For us in AMIQ, a company based in Romania – Europe, having DVCon US as a virtual conference is an advantage. We were able to attend most, if not all, of the interesting presentations from the conference. My colleague, Andrei Vintila, along with several others, have put together another highlight for this year’s content. If you missed the conference, don’t miss its highlights.
![]() Cristian Slav, has shared another interesting topic with us. How to use UVM callbacks to update values of the configuration fields. Have a look at it, maybe you’ll find it useful in one of your current or future projects.
Cristian Slav, has shared another interesting topic with us. How to use UVM callbacks to update values of the configuration fields. Have a look at it, maybe you’ll find it useful in one of your current or future projects.
Recommended Articles – December 2021
Here we are, at the end of 2021. It was another challenging year. During 2021 as well as 2020, working from home was probably the established norm among our industry. Some of you, have probably started a back-to-the-office process, where the real, face to face interaction is one of the most important part. Even so, working from home or from the office, I’m sure that my industry peers are still setting the standards high in order to architect, design, verify and deliver new and innovative technologies for the benefit of every human.
Now, it’s time for a rest. Balance your work. Take a step back, relax and recharge your batteries. Reflect on the past events, envision the future events, think about the real meaning of life, celebrate with your family, appreciate your friends, forgive the wrongdoers, be humble, pray if you are a believer, nourish your feelings with a positive vibe, forget about work, be grateful for what you have, help the others. If not now, then when?
I wish you a Merry Christmas, enjoy the winter holidays and see you in 2022!
Recommended Articles – November 2021
![]() Similar to 2020, DVCon Europe 2021 conference was set to be online in a virtual environment. AMIQ attended the conference from the viewer seat. My colleague, Ionut Ciocîrlan, orchestrated a nice article about the technical content of the conference. This article is a joint effort of several colleagues. Here are the Highlights of DVCon EU 2021.
Similar to 2020, DVCon Europe 2021 conference was set to be online in a virtual environment. AMIQ attended the conference from the viewer seat. My colleague, Ionut Ciocîrlan, orchestrated a nice article about the technical content of the conference. This article is a joint effort of several colleagues. Here are the Highlights of DVCon EU 2021.
![]() DVClub Europe 2021, is another verification related conference. It is organized every year by Mike Bartley from TVS. This time the main focus of the conference was machine learning and artificial intelligence and their usage in EDA tools. The content of the conference was a mix of technical and marketing information. You can check out the slides/videos on TVS website. Cadence, Siemens and Brekker were the companies to showcase their ML and AI EDA capable tools.
DVClub Europe 2021, is another verification related conference. It is organized every year by Mike Bartley from TVS. This time the main focus of the conference was machine learning and artificial intelligence and their usage in EDA tools. The content of the conference was a mix of technical and marketing information. You can check out the slides/videos on TVS website. Cadence, Siemens and Brekker were the companies to showcase their ML and AI EDA capable tools.
From this conference I found out that Verifyter with their PinDown tool was acquired by Cadence and OneSpin was acquired by Siemens.
Recommended Articles – October 2021
 This year in June, Tom Fitzpatrick has addressed an interesting and actual topic in a discussion with 5 experienced engineers: Remote Work, Remote Chip Design: Building Chips During a Pandemic. While listening to the industry mates, I found it very easy to relate to their own experience from this pandemic period. Working from home is not something new in our industry, but the scale of it. New challenges appear, collaboration is now different, the synergy of technology and social side of our work is observed and sometimes redefined. I’m sure you will find the discussion very interesting.
This year in June, Tom Fitzpatrick has addressed an interesting and actual topic in a discussion with 5 experienced engineers: Remote Work, Remote Chip Design: Building Chips During a Pandemic. While listening to the industry mates, I found it very easy to relate to their own experience from this pandemic period. Working from home is not something new in our industry, but the scale of it. New challenges appear, collaboration is now different, the synergy of technology and social side of our work is observed and sometimes redefined. I’m sure you will find the discussion very interesting.
 ESD Alliance and Accellera looked beyond the pandemic as companies start bringing employees back to the office. A panel of experts explored an executive view and strategies of how the transition from remote work back to the office will unfold: The executive view – returning to the office
ESD Alliance and Accellera looked beyond the pandemic as companies start bringing employees back to the office. A panel of experts explored an executive view and strategies of how the transition from remote work back to the office will unfold: The executive view – returning to the office
Recommended Articles – September 2021
![]() Steven Leibson, from Electric Journal, has compiled a top view list regarding what should make you choose or not choose one of these two hardware paradigms: FPGA (Field Programmable Gate Array) or ASIC (Application Specific Integrated Circuit). The comments thread is interesting also, since industry mates share their experience and oppinion regarding the FPGA vs ASIC topic. Read the article and enjoy the comments over here:
Steven Leibson, from Electric Journal, has compiled a top view list regarding what should make you choose or not choose one of these two hardware paradigms: FPGA (Field Programmable Gate Array) or ASIC (Application Specific Integrated Circuit). The comments thread is interesting also, since industry mates share their experience and oppinion regarding the FPGA vs ASIC topic. Read the article and enjoy the comments over here:
Building chips 11 Reasons You Should NOT use an FPGA for a Design, and Four Reasons You Should
![]() Cristian Slav, from CFSVision, shows one way of avoiding class overrides, but still be able to access protected fields/methods of a class. Sounds strange, but you may decide for yourself if you need that and if it helps or not: How to Access a Protected Property or Method in SystemVerilog
Cristian Slav, from CFSVision, shows one way of avoiding class overrides, but still be able to access protected fields/methods of a class. Sounds strange, but you may decide for yourself if you need that and if it helps or not: How to Access a Protected Property or Method in SystemVerilog
Recommended Articles – August 2021
![]() Iuliana Leuștean from Amiq describes how to upscale images using machine learning and what to expect in terms of performance and image quality when comparing it with classic interpolation algorithms. She managed to get great results by using high-level synthesis on FPGA. Read more in the full article.
Iuliana Leuștean from Amiq describes how to upscale images using machine learning and what to expect in terms of performance and image quality when comparing it with classic interpolation algorithms. She managed to get great results by using high-level synthesis on FPGA. Read more in the full article.
Recommended Articles – May 2021
![]() Specman/e-language community has had the opportunity to share ideas and ask questions about the most interesting feature of the language: macros. Here is an article which centralizes this Q&A session. Those having a Cadence support account can also watch the video presentation over here.
Specman/e-language community has had the opportunity to share ideas and ask questions about the most interesting feature of the language: macros. Here is an article which centralizes this Q&A session. Those having a Cadence support account can also watch the video presentation over here.
Recommended Articles – April 2021
![]() My colleague Mihai-Corneliu Cristescu is researching ways to enhance functional verification using intelligent automation. He did a thorough review and analyzed Machine Learning Techniques for Improving the Performance Metrics of Functional Verification. He wrapped up and published his conclusions in the Romanian Journal of Information Science and Technology. You can see a written summary over here and read the details over here.
My colleague Mihai-Corneliu Cristescu is researching ways to enhance functional verification using intelligent automation. He did a thorough review and analyzed Machine Learning Techniques for Improving the Performance Metrics of Functional Verification. He wrapped up and published his conclusions in the Romanian Journal of Information Science and Technology. You can see a written summary over here and read the details over here.
![]() Using Python in verification is not a brand new thing, but for sure it did not reach the mainstream attention of the verification community. I admire that DVClub Europe 2021 conference invited the community to discuss this topic. I invite you to go through the slides and watch the video recordings on the TVS website. I would also like to list the highlights of the conference: PyUVM – Using Python in Verification, Constrained Random Stimulus Generation in Python, Coverage in Python – pros and cons, Why you shouldn’t use Python in Verification and Processor Verification in Python,
Using Python in verification is not a brand new thing, but for sure it did not reach the mainstream attention of the verification community. I admire that DVClub Europe 2021 conference invited the community to discuss this topic. I invite you to go through the slides and watch the video recordings on the TVS website. I would also like to list the highlights of the conference: PyUVM – Using Python in Verification, Constrained Random Stimulus Generation in Python, Coverage in Python – pros and cons, Why you shouldn’t use Python in Verification and Processor Verification in Python,
Recommended Articles – March 2021
![]() My colleagues Ioana Catalina Cristea and Dragos Dospinescu have created a novel approach in co-emulation, validated with leading FPGA platform. It is called OFC (Open-source Framework for Co-emulation). They have put a significant effort in getting this framework out there to the public and this effort was rewarded by receiving the third place Stuart Sutherland best paper award at the DVCon US 2021. You can view the video presentation over here, see a written summary over here, read the details over here and browse the code over here.
My colleagues Ioana Catalina Cristea and Dragos Dospinescu have created a novel approach in co-emulation, validated with leading FPGA platform. It is called OFC (Open-source Framework for Co-emulation). They have put a significant effort in getting this framework out there to the public and this effort was rewarded by receiving the third place Stuart Sutherland best paper award at the DVCon US 2021. You can view the video presentation over here, see a written summary over here, read the details over here and browse the code over here.
![]() If you ever wonder what happened during DVCon US 2021, Ionut Ciocirlan has summarized a lot of the technical presentations under Highlights of DVCon US 2021. Don’t miss it, maybe you can find interesting presentations.
If you ever wonder what happened during DVCon US 2021, Ionut Ciocirlan has summarized a lot of the technical presentations under Highlights of DVCon US 2021. Don’t miss it, maybe you can find interesting presentations.
Recommended Articles – February 2021
![]() AMIQ is going to participate at DVCon US 2021. Here is the announcement of our presentation.
AMIQ is going to participate at DVCon US 2021. Here is the announcement of our presentation.
![]() Last year, Tudor Timisescu from the Verification Gentleman published an article about Formal Verification. More exact it is A Comparison of Formal and Simulation for a Simple, Yet Non-Trivial Design – Part 1. In this part 1 he describes an imaginary design and builds assertions and properties out of it, for the scope of using formal verification concepts.
Last year, Tudor Timisescu from the Verification Gentleman published an article about Formal Verification. More exact it is A Comparison of Formal and Simulation for a Simple, Yet Non-Trivial Design – Part 1. In this part 1 he describes an imaginary design and builds assertions and properties out of it, for the scope of using formal verification concepts.
 Even if the following is a presentation from 2019 DVCon conference, it is still valuable for people using UVM. Cliff Cummings, has a great experience with SystemVerilog and UVM. He is one of the people who worked on the Verilog and SystemVerilog standards. In these 2 videos posted on the Accellera website, he presents in a simple yet comprehensive way, how certain UVM mechanisms (e.g. messaging, transactions, sequences, analysis ports) are working or are intended to work. I highly recommend you view both presentations: Gain Valuable Insight into — and Make the Most Out of — the Changes and Features that Are Part of the New IEEE 1800.2 Standard for UVM
Even if the following is a presentation from 2019 DVCon conference, it is still valuable for people using UVM. Cliff Cummings, has a great experience with SystemVerilog and UVM. He is one of the people who worked on the Verilog and SystemVerilog standards. In these 2 videos posted on the Accellera website, he presents in a simple yet comprehensive way, how certain UVM mechanisms (e.g. messaging, transactions, sequences, analysis ports) are working or are intended to work. I highly recommend you view both presentations: Gain Valuable Insight into — and Make the Most Out of — the Changes and Features that Are Part of the New IEEE 1800.2 Standard for UVM
![]() Last year, Chris Spear and Rich Edelman, wrote several UVM coding guidelines on how to offer clarity in a complex world.
Last year, Chris Spear and Rich Edelman, wrote several UVM coding guidelines on how to offer clarity in a complex world.
![]() Yoav from Foretellix, continues his quest to understand and define ADAS (Advanced Driver-Assistance Systems) and AV (Autonomous Vehicle) related topics. This time he is looking on how to estimate the residual risk of ADAS / AV: part1 and part2
Yoav from Foretellix, continues his quest to understand and define ADAS (Advanced Driver-Assistance Systems) and AV (Autonomous Vehicle) related topics. This time he is looking on how to estimate the residual risk of ADAS / AV: part1 and part2
Recommended Articles – January 2021
![]() We’ve been thinking that good technical articles are always valuable and sometimes you want to see them all in one place. AMIQ brings forward another technical resource for any verification engineer. All our recommended articles since 2014, are now merged together and you can view them in the resource page which we call recommended articles aggregator.
We’ve been thinking that good technical articles are always valuable and sometimes you want to see them all in one place. AMIQ brings forward another technical resource for any verification engineer. All our recommended articles since 2014, are now merged together and you can view them in the resource page which we call recommended articles aggregator.
Recommended Articles – December 2020
![]() Specman and e-language abound in features, some of them are well known some others less known. In my last article, I focus on a less known feature which can be called as string templates
Specman and e-language abound in features, some of them are well known some others less known. In my last article, I focus on a less known feature which can be called as string templates
We come closer to ending a tumultuous 2020. Literally, the entire world has been challenged to rethink its priorities and values, given the pandemic situation. I hope and pray for a wiser, happier, and fearless 2021. I wish you all a Merry Christmas and a Happy New Year!
Enjoy the Holidays!
Recommended Articles – November 2020
![]() AMIQ has published a new set of verification resources. Cheatsheets for SystemVerilog and for SystemVerilog Assertions. When in need, every verification engineer now has a reference where to quickly search for basic information. SystemVerilog and SVA Cheatsheet
AMIQ has published a new set of verification resources. Cheatsheets for SystemVerilog and for SystemVerilog Assertions. When in need, every verification engineer now has a reference where to quickly search for basic information. SystemVerilog and SVA Cheatsheet
![]() Manish, from Learn UVM Verification, continues his series on UVM RAL. This time he shows how to implement UVM RAL.
Manish, from Learn UVM Verification, continues his series on UVM RAL. This time he shows how to implement UVM RAL.
Recommended Articles – October 2020
![]() AMIQ has released a new UVC that facilitates register accesses. It is called Register Agent: Register Agent: A UVC for Register Access.
AMIQ has released a new UVC that facilitates register accesses. It is called Register Agent: Register Agent: A UVC for Register Access.
![]() Manish from Learn UVM Verification explains why we need a UVM Register Abstraction Layer: Why UVM RAL is needed?.
Manish from Learn UVM Verification explains why we need a UVM Register Abstraction Layer: Why UVM RAL is needed?.
![]() Cadence released a new feature that allows you to integrate Python code into e-language. They now provide a nice example for visualizing the vr_ad register accesses in the form of a heatmap. The Python code is OpenSource and you may use it in your e-Language project: Ouch that’s Hot! Register Access Heatmap.
Cadence released a new feature that allows you to integrate Python code into e-language. They now provide a nice example for visualizing the vr_ad register accesses in the form of a heatmap. The Python code is OpenSource and you may use it in your e-Language project: Ouch that’s Hot! Register Access Heatmap.
Recommended Articles – September 2020
![]() Did you know that you can match strings using regular expressions from within SystemVerilog code? UVM implements a function called uvm_re_match. My colleague, Florin Oancea, explains how to use it and what you should pay attention at: How to Match Strings in SystemVerilog Using Regular Expressions
Did you know that you can match strings using regular expressions from within SystemVerilog code? UVM implements a function called uvm_re_match. My colleague, Florin Oancea, explains how to use it and what you should pay attention at: How to Match Strings in SystemVerilog Using Regular Expressions
In the August edition of the recommended articles I mentioned a challenge launched by Neil Johnson. The answers to this challenge are now posted by Dave Rich in his SystemVerilog Race Condition Challenge Responses article. It is a good reference on what NOT to do when writing RTL or TB code.
Recently, I learned about an emerging and impressive AI System called GPT-3. This GPT-3 (Generative Pre-trained Transformer 3) is an autoregressive language model that uses deep learning to produce human-like text. David Chalmers, an Australian philosopher, described GPT-3 as “one of the most interesting and important AI systems ever produced”.
GPT-3 was used to write the following article. Can you distinguish it from a human being? A robot wrote this entire article. Are you scared yet, human?.
But how is this GPT-3 system being verified? Yoav Hollander, already started to think about its verification: GPT-3 and verification.
A LinkedIn post from Yousef B. Bedoustani, pointed out how same hardware design problem approached with two different mentalities can lead to very different solutions: RTL vs. Software Mentality in FPGA/ASIC Design; Latency From 161 to 2 Clock Cycle!
The FOSSI foundation announced that you can now produce your own physical chips. For free. In the Open. The “open” part is guaranteed by the open source PDK (Process Design Kit) called Skywater PDK. The “free” part is guaranteed by Google and efabless.
They are providing completely free of cost chip manufacturing runs: one in November this year, and multiple more in 2021. All open source chip designs qualify, no further strings attached!
May your ASIC come true!
Recommended Articles – August 2020
![]() Ioana Cristea from Amiq shows how to achieve a non blocking communication between the SystemVerilog simulator and an external component, like Python: Non-Blocking Socket Communication in SystemVerilog Using DPI-C.
Ioana Cristea from Amiq shows how to achieve a non blocking communication between the SystemVerilog simulator and an external component, like Python: Non-Blocking Socket Communication in SystemVerilog Using DPI-C.
![]() Neil Johnson and Dave Rich have launched a challenge to the verification community. Discover and fix race conditions inside 10 SystemVerilog code snippets. Read more in SystemVerilog Race Condition Challenge
Neil Johnson and Dave Rich have launched a challenge to the verification community. Discover and fix race conditions inside 10 SystemVerilog code snippets. Read more in SystemVerilog Race Condition Challenge
Recommended Articles – July 2020
![]() Neil Johnson announced he will take a step back and pass the leadership of SVUnit project to Tudor Timisescu, aka Verification Gentleman. SVUnit is a consistent and valuable contribution to the verification community and I am happy it is not lost. That’s the OpenSource spirit at work!
Neil Johnson announced he will take a step back and pass the leadership of SVUnit project to Tudor Timisescu, aka Verification Gentleman. SVUnit is a consistent and valuable contribution to the verification community and I am happy it is not lost. That’s the OpenSource spirit at work!
![]() Welcome back Manish! After four years of silence, LearnUvmVerification comes back with: What is UVM RAL?.
Welcome back Manish! After four years of silence, LearnUvmVerification comes back with: What is UVM RAL?.
![]() Chris Spear, from Mentor, is inviting us to explore what importing a SystemVerilog package means.
Chris Spear, from Mentor, is inviting us to explore what importing a SystemVerilog package means.
![]() The Fossi Foundation promotes the opportunity of producing your own physical chips. For free. In the Open.
The Fossi Foundation promotes the opportunity of producing your own physical chips. For free. In the Open.
Recommended Articles – June 2020
![]() SystemVerilog Multidimensional Arrays is a juicy topic for a blog post given they are feature reach. Here is a post that explains some of the features: SystemVerilog Multidimensional Arrays
SystemVerilog Multidimensional Arrays is a juicy topic for a blog post given they are feature reach. Here is a post that explains some of the features: SystemVerilog Multidimensional Arrays
![]() A long-awaited feature comes into existence: adjusting verification environment behavior based on collected coverage items in real time at run time. Specman team facilitates this operation by means of coverage callbacks: Improving Tests Efficiency using Coverage Callback (part 2)
A long-awaited feature comes into existence: adjusting verification environment behavior based on collected coverage items in real time at run time. Specman team facilitates this operation by means of coverage callbacks: Improving Tests Efficiency using Coverage Callback (part 2)
Recommended Articles – May 2020
![]() Regressions can be an important resource consumer. Daniel Ciupitu, from AMIQ Consulting, provides a recipe for optimizing the disk usage when running regressions: How To Optimize Disk Space When Running Regressions
Regressions can be an important resource consumer. Daniel Ciupitu, from AMIQ Consulting, provides a recipe for optimizing the disk usage when running regressions: How To Optimize Disk Space When Running Regressions
Elihai Maicas, from Intel, talks about RAL classes and how they affect performance. He offers a tip on how to deal with that. Read more in his Verification tip of the day
![]() Chris Spear, from Mentor, reveals tips and tricks from his verification journey. The last one is about UVM Configuration DB and how to optimize its performance.
Chris Spear, from Mentor, reveals tips and tricks from his verification journey. The last one is about UVM Configuration DB and how to optimize its performance.
![]() Analyzing coverage during test run time and making decisions based on the coverage level. How does that sound? Specman introduced a coverage callback mechanism for exactly that. This new feature touches similar area as our AMIQ CoverageLens application. Have a look at both and thrust your verification power.
Analyzing coverage during test run time and making decisions based on the coverage level. How does that sound? Specman introduced a coverage callback mechanism for exactly that. This new feature touches similar area as our AMIQ CoverageLens application. Have a look at both and thrust your verification power.
Recommended Articles – April 2020
![]() Out of this DVCon presentation Tudor got inspired and extended the solution of adding constraints into their own objects. Take a look at his new UVM journey: Favor Composition Over Inheritance – Even for Constraints
Out of this DVCon presentation Tudor got inspired and extended the solution of adding constraints into their own objects. Take a look at his new UVM journey: Favor Composition Over Inheritance – Even for Constraints
Elihai Maicas, from Intel, started a series of verification tips. Here is one of them on how to turn assertions off: Dynamically Turn-off a System-Verilog Assertion
![]() Chris Spear, from Mentor, presents in an intuitive way what are parameterized classes and static properties of the SystemVerilog classes.
Chris Spear, from Mentor, presents in an intuitive way what are parameterized classes and static properties of the SystemVerilog classes.
Recommended Articles – March 2020
![]() In the CNN using HLS post my colleague, Sergiu Duda, provides the long awaited code for the How to Implement a Convolutional Neural Network Using High Level Synthesis article.
In the CNN using HLS post my colleague, Sergiu Duda, provides the long awaited code for the How to Implement a Convolutional Neural Network Using High Level Synthesis article.
![]() HLS using C synthesis has brought FPGA implementation of computational intensive tasks into mainstream. Hardware for Deep Learning: Know Your Options article proposes a new solution, called LeFlow, where the High Level Synthesis is done directly from the Python code. LeFlow aims to realize a seamless transition between training on a GPU cluster and the deployment on an FPGA.
HLS using C synthesis has brought FPGA implementation of computational intensive tasks into mainstream. Hardware for Deep Learning: Know Your Options article proposes a new solution, called LeFlow, where the High Level Synthesis is done directly from the Python code. LeFlow aims to realize a seamless transition between training on a GPU cluster and the deployment on an FPGA.
Recommended Articles – December 2019
![]() In early 2018, AMIQ released a new library called FC4SC (Functional Coverage for SystemC). The community responded in a positive manner and started to evaluate it and asked for improvements. Late this year, the library has been donated to Accellera in order to fill the functional coverage gap from the SystemC world. More on the reasoning behind the library and its future in this article: AMIQ Consulting Contributes C++ Coverage Library to Accellera
In early 2018, AMIQ released a new library called FC4SC (Functional Coverage for SystemC). The community responded in a positive manner and started to evaluate it and asked for improvements. Late this year, the library has been donated to Accellera in order to fill the functional coverage gap from the SystemC world. More on the reasoning behind the library and its future in this article: AMIQ Consulting Contributes C++ Coverage Library to Accellera
![]() Adam Rose, from Verilab, wrote a paper in the form of enhancement proposals for the SystemVerilog language standard. He looked at Python and C++ and tried to borough concepts and apply them to SystemVerilog. In this new SystemVerilog language quest (anonymous classes, introspection, decoration), he described how code constructs like uvm_macros, uvm_factory, constraints and functions would morph into a different kind of code constructs and not only. I think the final paragraph summarizes the goal of the paper:
Adam Rose, from Verilab, wrote a paper in the form of enhancement proposals for the SystemVerilog language standard. He looked at Python and C++ and tried to borough concepts and apply them to SystemVerilog. In this new SystemVerilog language quest (anonymous classes, introspection, decoration), he described how code constructs like uvm_macros, uvm_factory, constraints and functions would morph into a different kind of code constructs and not only. I think the final paragraph summarizes the goal of the paper:
In many ways, these enhancements simply bring SystemVerilog up to date with recent
developments in programming languages. By using them, Verification engineers will be able
to enhance their productivity by writing more concise, modular and maintainable code.
This is the last article for 2019, thus, I take the chance to wish you a Merry Christmas and hope, we all contribute to a better, safer and peaceful new year. Happy New 2020!
Enjoy the holidays!
Recommended Articles – December 2018
![]() Sergiu Duda from AMIQ has put a lot of effort into creating a high quality article on the non-trivial topics of High Level Synthesis and Deep Learning. The later, is not found in the everyday terminology of a verification engineer. Deep learning is just a flavour of a bigger part called Machine Learning which in its turn is part of the bigger, Artificial Intelligence.
Sergiu Duda from AMIQ has put a lot of effort into creating a high quality article on the non-trivial topics of High Level Synthesis and Deep Learning. The later, is not found in the everyday terminology of a verification engineer. Deep learning is just a flavour of a bigger part called Machine Learning which in its turn is part of the bigger, Artificial Intelligence.
I do think you will get more meaning out of this topic after spending your time on reading his article: How to Implement a Convolutional Neural Network Using High Level Synthesis
Since 2018 is coming to an end and we are days apart from Christmas, I take the chance and wish you a Merry Christmas and hope that the new year brings joy and happiness to all of us.
Enjoy the holiday time!
Recommended Articles – November 2018
![]() New data arrived from the 2018 Wilson Research Group Functional Verification Study. This research is done every two years and it shows trends in our functional verification domain. If you are interested in the data you can read the set of articles that will follow on verification horizons. Here are the first ones: Prologue, Part 1 and Part 2.
New data arrived from the 2018 Wilson Research Group Functional Verification Study. This research is done every two years and it shows trends in our functional verification domain. If you are interested in the data you can read the set of articles that will follow on verification horizons. Here are the first ones: Prologue, Part 1 and Part 2.
![]() Cristian continues his series on SystemC tutorial. This time he is talking about module hierarchy and connectivity.
Cristian continues his series on SystemC tutorial. This time he is talking about module hierarchy and connectivity.
Recommended Articles – October 2018
![]() Cristian from CFSVision wrote a short tutorial on how to work with SystemVerilog queues.
Cristian from CFSVision wrote a short tutorial on how to work with SystemVerilog queues.
![]() Cadence published a new article in the series regarding SystemVerilog code optimizations. This time it tackles the subject of creating and managing dynamic objects.
Cadence published a new article in the series regarding SystemVerilog code optimizations. This time it tackles the subject of creating and managing dynamic objects.
![]() AnySilicon published an article aiming to describe the stages of ASIC production. The big picture always helps to a better understanding of our domain.
AnySilicon published an article aiming to describe the stages of ASIC production. The big picture always helps to a better understanding of our domain.
Recommended Articles – September 2018
![]() In case of e-language it is the aspect oriented-nature of the language itself that helps cutting down the compile and simulation rerun time. You can read more about dynamic load or just-in-time patching: Adding a Patch Just in Time!.
In case of e-language it is the aspect oriented-nature of the language itself that helps cutting down the compile and simulation rerun time. You can read more about dynamic load or just-in-time patching: Adding a Patch Just in Time!.
I always try to find ways of shortening the time it takes to wait for various actions like: compilation, simulation, debug, analyze. Such a time saving feature is e-language’s patching/extension capability due to its aspect oriented nature of the language. But Cadence made it to the next level, adding a patch on top of an existing compilation or restarting a previous simulation from a specific timepoint and loading a new piece of code on top of the previous simulation. Read more in:
![]() Verification Academy has published a new version of the UVM 1800.2 Cookbook. You need to login if you want to download it.
Verification Academy has published a new version of the UVM 1800.2 Cookbook. You need to login if you want to download it.
Recommended Articles – August 2018
![]() In his article about how to avoid FIFO overflows, Stefan promised a second solution. Here is part II of the article presenting the solution which makes use of uvm constructs.
In his article about how to avoid FIFO overflows, Stefan promised a second solution. Here is part II of the article presenting the solution which makes use of uvm constructs.
![]() Neil from AgileSOC continues to simplify the SVAUnit framework. He makes use of his new mocking framework in order to decouple the driver from the sequencer. In this way he is able to UnitTest the UVM drivers without the sequencer. Then he applies the same concept on the sequences. Another idea from his side is make use of the popular wavedrom application in order to generate test stimuli for UnitTesting. I personally like the idea of transforming waveforms into a piece of code.
Neil from AgileSOC continues to simplify the SVAUnit framework. He makes use of his new mocking framework in order to decouple the driver from the sequencer. In this way he is able to UnitTest the UVM drivers without the sequencer. Then he applies the same concept on the sequences. Another idea from his side is make use of the popular wavedrom application in order to generate test stimuli for UnitTesting. I personally like the idea of transforming waveforms into a piece of code.
Recommended Articles – July 2018
![]() AMIQ Education Program saga continues…. This years’ summer school received more attention from the students according to Stefan’s feedback: Digital Circuits Simulation and Verification Summer School.
AMIQ Education Program saga continues…. This years’ summer school received more attention from the students according to Stefan’s feedback: Digital Circuits Simulation and Verification Summer School.
![]() FIFOs are encountered in many digital designs and the verification of such designs comes with specific challenges, one of them being to protect the FIFOs against overflow. You can read more about it in: How To Protect FIFOs Against Overflow post. An alternative implementation will be given in a follow-up post.
FIFOs are encountered in many digital designs and the verification of such designs comes with specific challenges, one of them being to protect the FIFOs against overflow. You can read more about it in: How To Protect FIFOs Against Overflow post. An alternative implementation will be given in a follow-up post.
![]() AMIQ and Cadence have exhibited at DAC 2018 on the support they provide for the new Portable Stimulus Standard (PSS): AMIQ and Cadence demonstrate Accellera PSS v1.0 interoperability.
AMIQ and Cadence have exhibited at DAC 2018 on the support they provide for the new Portable Stimulus Standard (PSS): AMIQ and Cadence demonstrate Accellera PSS v1.0 interoperability.
![]() Neil Johnson has created a mocking framework for the SVUnit called SVMock. You can read more about it here: SVMock Version 0.1.
Neil Johnson has created a mocking framework for the SVUnit called SVMock. You can read more about it here: SVMock Version 0.1.
Recommended Articles – June 2018
![]() We present to you the SystemVerilog and VHDL Grammars in HTML format. The grammars represent the BNF (Backus-Naur Form) notation in an HTML format, with hyperlinks, anchors and tooltips. You can also download them from the GitHub repository.
We present to you the SystemVerilog and VHDL Grammars in HTML format. The grammars represent the BNF (Backus-Naur Form) notation in an HTML format, with hyperlinks, anchors and tooltips. You can also download them from the GitHub repository.
![]() John Neil, from AgileSOC, continues his reflection on how verification engineers should think about their testbench code: AgileSOC: Balancing Verification Development With Delivery.
John Neil, from AgileSOC, continues his reflection on how verification engineers should think about their testbench code: AgileSOC: Balancing Verification Development With Delivery.
![]() Cadence continues its series of SystemVerilog code optimization. They are provided as guidelines, which if thought before writing a single line of code, can help with simulation performance: Part II, Part III.
Cadence continues its series of SystemVerilog code optimization. They are provided as guidelines, which if thought before writing a single line of code, can help with simulation performance: Part II, Part III.
![]() Here is a new way of controlling e-language generator. It is done by the help of the so called Range Generated Fields: Empowering Generation – Range Generated Fields (RGF).
Here is a new way of controlling e-language generator. It is done by the help of the so called Range Generated Fields: Empowering Generation – Range Generated Fields (RGF).
![]() In June the verification community had an opportunity to share ideas and solutions regarding verification, by means of Verification Futures 2018 conference. If you missed it, you can check out the presentation slides and videos over here: Verification Futures 2018.
In June the verification community had an opportunity to share ideas and solutions regarding verification, by means of Verification Futures 2018 conference. If you missed it, you can check out the presentation slides and videos over here: Verification Futures 2018.
Recommended Articles – May 2018
![]() Here is an interesting article discussing if any FPGA implementation contains an internal tri-state bus or not: FPGA internal tri-state buses
Here is an interesting article discussing if any FPGA implementation contains an internal tri-state bus or not: FPGA internal tri-state buses
![]() I’m not a fan of long articles, but the subject of the following ones is of real interest for verification engineers. It is a transcript of a discussion between representatives of major EDA companies about EDA tools and their option of going to the cloud. Tools and the future of those tools might influence how we do verification in the future. You can read their discussion in a series of three articles from Brian Bailey-SemiEngineering: EDA in the cloud Part1, Part2, Part3.
I’m not a fan of long articles, but the subject of the following ones is of real interest for verification engineers. It is a transcript of a discussion between representatives of major EDA companies about EDA tools and their option of going to the cloud. Tools and the future of those tools might influence how we do verification in the future. You can read their discussion in a series of three articles from Brian Bailey-SemiEngineering: EDA in the cloud Part1, Part2, Part3.
![]() A short introduction to the AMBA bus and the AXI protocol can be read on the AnySilicon website.
A short introduction to the AMBA bus and the AXI protocol can be read on the AnySilicon website.
![]() Every experienced verification engineer has been at least once through the scenario described by Mark Glasser in his last article: Debugging madness. The way we can deal with these kind of “brain stalls” is diverse. It might also help if we understand how the brain works and how learning process works. I strongly suggest to follow up a course about “Learning How to Learn” from Coursera.
Every experienced verification engineer has been at least once through the scenario described by Mark Glasser in his last article: Debugging madness. The way we can deal with these kind of “brain stalls” is diverse. It might also help if we understand how the brain works and how learning process works. I strongly suggest to follow up a course about “Learning How to Learn” from Coursera.
![]() Neil Johnson steps out of the verification circle and uses his critical thinking to address the high level picture about Verification. He also tries to connect the dots through the lens of his past experiences in verification. Verification Planning with shared objectives is considered, followed by metrics for design maturity and then finding a cure for what he calls “coverage hangover”
Neil Johnson steps out of the verification circle and uses his critical thinking to address the high level picture about Verification. He also tries to connect the dots through the lens of his past experiences in verification. Verification Planning with shared objectives is considered, followed by metrics for design maturity and then finding a cure for what he calls “coverage hangover”
Recommended Articles – April 2018
![]() This month, Neil Johnson (AgileSOC) has challenged the verification community in an attempt to define a scope for the new Portable Stimulus Standard (PSS) and a place among the other existing verification techniques. He presents his view in a series of three articles. One of the articles presents each verification technique and its scope. In a following article Neil presents how a verification engineer could determine when to use or not any of the verification techniques.
This month, Neil Johnson (AgileSOC) has challenged the verification community in an attempt to define a scope for the new Portable Stimulus Standard (PSS) and a place among the other existing verification techniques. He presents his view in a series of three articles. One of the articles presents each verification technique and its scope. In a following article Neil presents how a verification engineer could determine when to use or not any of the verification techniques.
Recommended Articles – March 2018
![]() Team Specman casts a new light on how to make the verification environment sensitive to reset. You can read about that in Temporals, Reset, and Test Phases
Team Specman casts a new light on how to make the verification environment sensitive to reset. You can read about that in Temporals, Reset, and Test Phases
![]() Cadence has compiled some short guidelines which can optimize your SystemVerilog code. Take a look at them and check which one is already on your list and which is not. App Note Spotlight: Streamline Your SystemVerilog Code, Part I
Cadence has compiled some short guidelines which can optimize your SystemVerilog code. Take a look at them and check which one is already on your list and which is not. App Note Spotlight: Streamline Your SystemVerilog Code, Part I
Recommended Articles – December 2017
![]() CFSVision continues the SystemC tutorial with an indepth explanation of the signal channels: Learning SystemC: Learning SystemC: #005 Signal Channels.
CFSVision continues the SystemC tutorial with an indepth explanation of the signal channels: Learning SystemC: Learning SystemC: #005 Signal Channels.
![]() PSS starts to be more and more present on verification blogs. Mike Bartley from T&VS and Sharon Rosenberg from Cadence co-edited Portable Stimulus Specification (PSS) and the Reuse Revolution.
PSS starts to be more and more present on verification blogs. Mike Bartley from T&VS and Sharon Rosenberg from Cadence co-edited Portable Stimulus Specification (PSS) and the Reuse Revolution.
![]() Giselquist Technologies presents how to build a simple logic PLL. This article helps you understand how logic PLLs work, which is important if you need to verify clock generators or clock recovery blocks.
Giselquist Technologies presents how to build a simple logic PLL. This article helps you understand how logic PLLs work, which is important if you need to verify clock generators or clock recovery blocks.
![]() AMIQ released a second version of the Open Source CoverageLens application. The new release extends the UCIS database inspection capabilities, as described in CoverageLens 2.0 Release article.
AMIQ released a second version of the Open Source CoverageLens application. The new release extends the UCIS database inspection capabilities, as described in CoverageLens 2.0 Release article.
We wish you Happy Holidays! and a 2018 full of accomplishments and happiness!
Recommended Articles – November 2017
![]() TeamSpecman extends e-Language with annotations: Adding Annotations in Your e Code, which are similar to Java annotations.
TeamSpecman extends e-Language with annotations: Adding Annotations in Your e Code, which are similar to Java annotations.
![]() SemiEngineering shows how PSS helps one to reuse tests from IP-level to SoC-level.
SemiEngineering shows how PSS helps one to reuse tests from IP-level to SoC-level.
![]() Horia from Amiq demonstrates how to avoid parameter creep in SystemVerilog by using packed struct. This comes as a continuation of Stefan’s previous article.
Horia from Amiq demonstrates how to avoid parameter creep in SystemVerilog by using packed struct. This comes as a continuation of Stefan’s previous article.
![]() Yoav Hollander keeps exploring the hazy AV verification territory:
Yoav Hollander keeps exploring the hazy AV verification territory:
Verifying how AVs behave during accidents.
Recommended Articles – October 2017
![]() Cristian from CFSVision continues the SystemC series with two new tutorials addressing Time, Events and Processes and Mutex, Semaphores and FIFOs.
Cristian from CFSVision continues the SystemC series with two new tutorials addressing Time, Events and Processes and Mutex, Semaphores and FIFOs.
![]() Stefan from Amiq shows how to create a custom sequencer arbitration policy in UVM.
Stefan from Amiq shows how to create a custom sequencer arbitration policy in UVM.
Recommended Articles – September 2017
![]() CFSVision continues the SystemC tutorial with an indepth explanation of the sc_module: Learning SystemC: #002 Module – sc_module
CFSVision continues the SystemC tutorial with an indepth explanation of the sc_module: Learning SystemC: #002 Module – sc_module
FPGA4Student explains how to implement a car parking system in VHDL.
![]() Working both with SystemC and SystemVerilog is not always an easy task. Teo from AMIQ facilitates understanding of data structures mirroring between SystemVerilog and SystemC: How to Align SystemVerilog-to-SystemC TLM Transactions Definitions
Working both with SystemC and SystemVerilog is not always an easy task. Teo from AMIQ facilitates understanding of data structures mirroring between SystemVerilog and SystemC: How to Align SystemVerilog-to-SystemC TLM Transactions Definitions
Recommended Articles – August 2017
New entry on our list FPGA4Student is a website dedicated to provide a lot of source code for various FPGA needs. It’s a good resource for learning how to code in Verilog or VHDL. Here is a comparison between Verilog and VHDL: Explain by Examples.
![]() Jason Yu from VerilogPro is set to compare implementation of arrays from Verilog versus SystemVerilog. He starts with the Verilog Arrays Plain and Simple.
Jason Yu from VerilogPro is set to compare implementation of arrays from Verilog versus SystemVerilog. He starts with the Verilog Arrays Plain and Simple.
![]() Cristian Slav from CFSVision continues his SystemC Learning. After a basic introduction and installation, he moves to the Data Types of SystemC.
Cristian Slav from CFSVision continues his SystemC Learning. After a basic introduction and installation, he moves to the Data Types of SystemC.
![]() SystemC language is lacking support for functional coverage. But when SystemC runs together with SystemVerilog, that inconvenience can be alleviated. Here is a tutorial on how to harness the power of SystemVerilog functional coverage constructs in a SystemC model: AMIQ Blog: How to Export Functional Coverage from SystemC to SystemVerilog.
SystemC language is lacking support for functional coverage. But when SystemC runs together with SystemVerilog, that inconvenience can be alleviated. Here is a tutorial on how to harness the power of SystemVerilog functional coverage constructs in a SystemC model: AMIQ Blog: How to Export Functional Coverage from SystemC to SystemVerilog.
![]() You can find the latest news about AMIQ Education Program in this new article by Stefan: Amiq Education Program Updates Summer 2017.
You can find the latest news about AMIQ Education Program in this new article by Stefan: Amiq Education Program Updates Summer 2017.
![]() Verification Summer School is a great way for students to learn about how we verify Digital Circuits, IC and SoCs. This year, we decided to open the source code of the school labs held by AMIQ. You can read more about it here: AMIQ Blog: Open Source Summer School Labs.
Verification Summer School is a great way for students to learn about how we verify Digital Circuits, IC and SoCs. This year, we decided to open the source code of the school labs held by AMIQ. You can read more about it here: AMIQ Blog: Open Source Summer School Labs.
![]() This is an old article by Jonathan Rentzsch (IBM, 2005) that’s worth reading. It tells the story of how data alignment and memory granularity influences the performance of a CPU: Data alignment: Straighten up and fly right.
This is an old article by Jonathan Rentzsch (IBM, 2005) that’s worth reading. It tells the story of how data alignment and memory granularity influences the performance of a CPU: Data alignment: Straighten up and fly right.
Recommended Articles – July 2017
Tudor (Verification Gentleman) continues his series of articles on unit testing with a case study on Testing SVA Properties and Sequences.
Ben Cohen (SystemVerilog.us) goes into details on how tasks and threads are used inside System Verilog Assertions. The Understanding the SVA Engine + Simple alternate solutions article also includes an SVA example that is easier to write using tasks.
 Dan Gisselquist (Gisselquist Technology) shows How to Debug a DSP algorithm by using Octave. Amiq has also been using Octave inside UVM test-benches to offload the work on complex mathematical computations.
Dan Gisselquist (Gisselquist Technology) shows How to Debug a DSP algorithm by using Octave. Amiq has also been using Octave inside UVM test-benches to offload the work on complex mathematical computations.
![]() Teo (Amiq) writes about one of our in-house tools that help with code coverage analysis: Coverage Lens. You can download the tool from GitHub.
Teo (Amiq) writes about one of our in-house tools that help with code coverage analysis: Coverage Lens. You can download the tool from GitHub.
Recommended Articles – June 2017
![]() UVM provides callbacks mechanism that allows one to expand code’s functionality. Munjal explains advanced usage of callbacks in UVM.
UVM provides callbacks mechanism that allows one to expand code’s functionality. Munjal explains advanced usage of callbacks in UVM.
![]() You might remember, from the highlights of DVCon US 2017 conference, that we recommended a paper about constrained random and dynamic seed manipulation (“Improving Constrained Random Testing by Achieving Simulation Verification Goals through Objective Functions, Rewinding and Dynamic Seed Manipulation”). The presenter, Eldon Nelson, working on Intel, owns a blog called Ten Thousand Failures and he made his paper publicly available in his latest June post. Check all the details of his solution over here: IMPROVING CONSTRAINED RANDOM TESTING – SECOND PLACE PAPER AT DVCON 2017.
You might remember, from the highlights of DVCon US 2017 conference, that we recommended a paper about constrained random and dynamic seed manipulation (“Improving Constrained Random Testing by Achieving Simulation Verification Goals through Objective Functions, Rewinding and Dynamic Seed Manipulation”). The presenter, Eldon Nelson, working on Intel, owns a blog called Ten Thousand Failures and he made his paper publicly available in his latest June post. Check all the details of his solution over here: IMPROVING CONSTRAINED RANDOM TESTING – SECOND PLACE PAPER AT DVCON 2017.
![]() Mark Glasser from Verification Land, has written an interesting article, Fun with Type Handles, about working with type handles in SystemVerilog. It is more or less a design pattern, used also inside UVM’s code. The pattern helps out when dealing with SystemVerilog types at run-time.
Mark Glasser from Verification Land, has written an interesting article, Fun with Type Handles, about working with type handles in SystemVerilog. It is more or less a design pattern, used also inside UVM’s code. The pattern helps out when dealing with SystemVerilog types at run-time.
![]() Cristian from CFSVision, started a series about how to handle reset in UVM. He takes his first part of the series and expands it with an explanation of the race conditions in relation to the order of reset threads: SystemVerilog: How To Handle Reset In UVM (part 2).
Cristian from CFSVision, started a series about how to handle reset in UVM. He takes his first part of the series and expands it with an explanation of the race conditions in relation to the order of reset threads: SystemVerilog: How To Handle Reset In UVM (part 2).
![]() Horia from AMIQ, continues the series of posts about packing/unpacking in SystemVerilog. This month the focus is placed on the unpacking mechanism from SystemVerilog:How to Unpack Data Using the SystemVerilog Streaming Operators (>>, <<). I consider it to be one of the best tutorials about packing and unpacking.
Horia from AMIQ, continues the series of posts about packing/unpacking in SystemVerilog. This month the focus is placed on the unpacking mechanism from SystemVerilog:How to Unpack Data Using the SystemVerilog Streaming Operators (>>, <<). I consider it to be one of the best tutorials about packing and unpacking.
Recommended Articles – May 2017
![]() Yet another way of connecting the testbench components to the interface containing the signals. Learn more about accessor classes and parametrization in the article How To Reduce the Number of VIP Instances using Accessor Classes
Yet another way of connecting the testbench components to the interface containing the signals. Learn more about accessor classes and parametrization in the article How To Reduce the Number of VIP Instances using Accessor Classes
![]() We have a new entry on our radar: VerificationLand. Mark Glasser displays his view of an SVlogical way of writing code. You can see it as tips&tricks for writing SystemVerilog code. He wrote another article about assumptions in verification. It can be very difficult to deal with assumptions. They might be hidden behind a piece of code or behind a verification plan. Take your time to read the articles and don’t make any assumptions.
We have a new entry on our radar: VerificationLand. Mark Glasser displays his view of an SVlogical way of writing code. You can see it as tips&tricks for writing SystemVerilog code. He wrote another article about assumptions in verification. It can be very difficult to deal with assumptions. They might be hidden behind a piece of code or behind a verification plan. Take your time to read the articles and don’t make any assumptions.
![]() Did you ever wondered what’s the difference between Verilog reg, Verilog wire and SystemVerilog logic? Jason Yu from VerilogPro takes this question and brings an eloquent answer to it:Verilog reg, Verilog wire, SystemVerilog logic. What’s the difference?
Did you ever wondered what’s the difference between Verilog reg, Verilog wire and SystemVerilog logic? Jason Yu from VerilogPro takes this question and brings an eloquent answer to it:Verilog reg, Verilog wire, SystemVerilog logic. What’s the difference?
![]() Here is a graphical representation of the SystemVerilog packing operation using streaming operators. I’ve been waiting for it since long time ago and I think the same goes for all of you. Check out Horia’s new article: >, <<)">How to Pack Data Using SystemVerilog Streaming Operators (>>, <<)
Here is a graphical representation of the SystemVerilog packing operation using streaming operators. I’ve been waiting for it since long time ago and I think the same goes for all of you. Check out Horia’s new article: >, <<)">How to Pack Data Using SystemVerilog Streaming Operators (>>, <<)
Recommended Articles – April 2017
![]() There are multiple ways of connecting a SystemVerilog interface instance to a virtual interface inside the verification environment. Cristian, described two ways of doing just that. One good old simple way when having just one interface instance and another one for multiple instances.
There are multiple ways of connecting a SystemVerilog interface instance to a virtual interface inside the verification environment. Cristian, described two ways of doing just that. One good old simple way when having just one interface instance and another one for multiple instances.
CFSVision: UVM: How to Pass a Virtual Interface from Testbentch to Environment
Recommended Articles – March 2017
![]() Using SystemVerilog along UVM methodology can be a difficult road for a newbie. Mentor together with Sandeep Nasa and Shankar Arora from Logic Fruit Technologies, have compiled a list of UVM tips&tricks that help you avoid some of the language traps and might improve performance. Read more on UVM Tips and Tricks
Using SystemVerilog along UVM methodology can be a difficult road for a newbie. Mentor together with Sandeep Nasa and Shankar Arora from Logic Fruit Technologies, have compiled a list of UVM tips&tricks that help you avoid some of the language traps and might improve performance. Read more on UVM Tips and Tricks
![]() Cadence has added static members in the e-language, so from now on you can share configuration, coverage or fields among all instances of a struct/unit. Take a look at this new feature in Static members in e
Cadence has added static members in the e-language, so from now on you can share configuration, coverage or fields among all instances of a struct/unit. Take a look at this new feature in Static members in e
![]() Communication within an UVM environment is mainly done using ports (analysis, TLM, etc.). A complex hierarchy of port connections slows down the debug…well, not for Munjal which describes a way to speed-up the debug: How to find UVM port connections between components in the testbench.
Communication within an UVM environment is mainly done using ports (analysis, TLM, etc.). A complex hierarchy of port connections slows down the debug…well, not for Munjal which describes a way to speed-up the debug: How to find UVM port connections between components in the testbench.
![]() This year DVCon US enchanted us with few innovative approaches on verification challenges. See more in AMIQ’s Highlights of DVCon US 2017.
This year DVCon US enchanted us with few innovative approaches on verification challenges. See more in AMIQ’s Highlights of DVCon US 2017.
![]() You take a 3rd year student, a mentor and an idea and stir (not shake) them. Read about the result on AMIQ’s blog: Mentoring Young Talent Through Hands-on Applications. This is part of the AMIQ Education Program.
You take a 3rd year student, a mentor and an idea and stir (not shake) them. Read about the result on AMIQ’s blog: Mentoring Young Talent Through Hands-on Applications. This is part of the AMIQ Education Program.
Recommended Articles – December 2016
![]() Often, it happens that the information about a Design Under Test (DUT) or about its verification is being organized in the form of a table like structure (configurations, registers, operation modes, traffic types, etc.). Imagine if you could automatically create bits of code from an Excel table. How awesome is that! E-language is now able to do just that. The power of the in_table construct is now doubled if combined with the e-language macros table_row and table from file with. Check out the details in Cadence’s article: Creating Code from Tables.
Often, it happens that the information about a Design Under Test (DUT) or about its verification is being organized in the form of a table like structure (configurations, registers, operation modes, traffic types, etc.). Imagine if you could automatically create bits of code from an Excel table. How awesome is that! E-language is now able to do just that. The power of the in_table construct is now doubled if combined with the e-language macros table_row and table from file with. Check out the details in Cadence’s article: Creating Code from Tables.
![]() AMIQ wrote a series of articles with the goal of educating graduates/engineers about WHAT does it mean to be a Verification Engineer and HOW you can become a Verification Engineer. Daniel Ciupitu, from AMIQ, continued the series answering the WHY question: AMIQ Blog: To be or not to be a Verification Engineer.
AMIQ wrote a series of articles with the goal of educating graduates/engineers about WHAT does it mean to be a Verification Engineer and HOW you can become a Verification Engineer. Daniel Ciupitu, from AMIQ, continued the series answering the WHY question: AMIQ Blog: To be or not to be a Verification Engineer.
Since holiday season is close-by, I wish you Merry Christmas and all the best during 2017!
Recommended Articles – November 2016
![]() Every design or verification engineer needed at some point in time a basic compile/run script. Go2UVM presents a basic compile/run script that supports all 4 major simulators (Incisive, VCS, QuestaSim and RivieraPro):
Every design or verification engineer needed at some point in time a basic compile/run script. Go2UVM presents a basic compile/run script that supports all 4 major simulators (Incisive, VCS, QuestaSim and RivieraPro):
Go2UVM: Generic Makefile for UVM simulations
![]() Go2UVM shows the basics of using variable delays in SystemVerilog Assertions:
Go2UVM shows the basics of using variable delays in SystemVerilog Assertions:
GO2UVM: Handling variable delays in SystemVerilog Assertions
![]() Manish Singhal opens a new topic: emulation. In this post he introduces the reader to emulation and explains the basic difference between emulation, simulation and prototyping:
Manish Singhal opens a new topic: emulation. In this post he introduces the reader to emulation and explains the basic difference between emulation, simulation and prototyping:
LearnUVMVerification: What is Emulation?
![]() Munjal explores a different way of creating stimulus using UVM’s uvm_random_stimulus class:
Munjal explores a different way of creating stimulus using UVM’s uvm_random_stimulus class:
Munjal: UVM Random Stimulus Generator
![]() Every activity domain makes use of patterns and functional verification is no exception. AMIQ engaged into a quest of discovering and revealing functional verification patterns. Here is the 4’th entry on our list of Functional Verification Patterns:
Every activity domain makes use of patterns and functional verification is no exception. AMIQ engaged into a quest of discovering and revealing functional verification patterns. Here is the 4’th entry on our list of Functional Verification Patterns:
AMIQ Blog: Functional Coverage Patterns: The Counter
![]() AMIQ is dedicated to introduction of functional verification as a study subject in the Romanian technical colleges. Here is another step forward:
AMIQ is dedicated to introduction of functional verification as a study subject in the Romanian technical colleges. Here is another step forward:
AMIQ Blog: Pre-Silicon Verification Course at Politehnica University of Timișoara
![]() AMIQ was present at the DVCon Europe 2016 in Germany, Munich. Ionuț Ciocîrlan presents the highlights of this year’s conference. Technical curating is not easy, but Ionuț makes it feel simple and pleasant to read:
AMIQ was present at the DVCon Europe 2016 in Germany, Munich. Ionuț Ciocîrlan presents the highlights of this year’s conference. Technical curating is not easy, but Ionuț makes it feel simple and pleasant to read:
AMIQ Blog: Highlights of DVCon Europe 2016
Recommended Articles – October 2016
![]() New entry on our list: FPGASite is a nice resource for FPGA/VHDL enthusiasts. Claudio Avi Cham, the owner of the website, shows how to implement an arbiter in VHDL:
New entry on our list: FPGASite is a nice resource for FPGA/VHDL enthusiasts. Claudio Avi Cham, the owner of the website, shows how to implement an arbiter in VHDL:
FPGASite: VHDL Arbiter Part 1, Part 2, Part 3
![]() What does a Functional Verification Engineer (FVE) do and how can you become an FVE? Stefan Birman, Managing Partner at AMIQ Consulting, answers this question, as close as possible to the reality of the Semiconductor Industry:
What does a Functional Verification Engineer (FVE) do and how can you become an FVE? Stefan Birman, Managing Partner at AMIQ Consulting, answers this question, as close as possible to the reality of the Semiconductor Industry:
AMIQ Blog: Pre-Silicon Digital Functional Verification Engineer – The Job Description
![]() The e-language users can download and use the I2C eVC (released by AMIQ as an Open Source eVC):
The e-language users can download and use the I2C eVC (released by AMIQ as an Open Source eVC):
AMIQ Blog: amiq_i2c – ‘e’ Verification Component for I2C Protocol
![]() Rich Edelman from Mentor presents in Debugging My UVM Factory and UVM Config how to improve the UVM Factory code in order to ease debug. He tells the story of a bug that was not easy to catch unless he instrumented the UVM code. Last week I also got a live preview of his article when I attended the presentation (5.2) of his colleague, Dirk Hansen at DVCon Europe 2016.
Rich Edelman from Mentor presents in Debugging My UVM Factory and UVM Config how to improve the UVM Factory code in order to ease debug. He tells the story of a bug that was not easy to catch unless he instrumented the UVM code. Last week I also got a live preview of his article when I attended the presentation (5.2) of his colleague, Dirk Hansen at DVCon Europe 2016.
![]() Munjal presents a simple way of building a scoreboard using the UVM infrastructure:
Munjal presents a simple way of building a scoreboard using the UVM infrastructure:
Munjal: Build an UVM scoreboard in few minutes
![]() Verilab presented 2 papers at the SNUG 2016 conference. The first one is about managing on the fly configurations of DUT using register model and configuration objects and the second one is about how to view the coverage in SystemVerilog with the “glasses” of the 2012 revision of SystemVerilog standard and UVM.
Verilab presented 2 papers at the SNUG 2016 conference. The first one is about managing on the fly configurations of DUT using register model and configuration objects and the second one is about how to view the coverage in SystemVerilog with the “glasses” of the 2012 revision of SystemVerilog standard and UVM.
Recommended Articles – September 2016
![]() Keisuke Shimizu, from ClueLogic, explains in his UVM tutorial series, how you can use register callbacks to implement side effects inside the UVM register model: ClueLogic: UVM Tutorial for Candy Lovers – 36. Register Callbacks
Keisuke Shimizu, from ClueLogic, explains in his UVM tutorial series, how you can use register callbacks to implement side effects inside the UVM register model: ClueLogic: UVM Tutorial for Candy Lovers – 36. Register Callbacks
![]() Special attention should be payed to loop variables, as their behavior depends on how the array dimensions are specified at declaration: AMIQ Blog: Gotcha: The Behavior of Foreach Loop Variables Depends on How the Array Dimensions Are Specified
Special attention should be payed to loop variables, as their behavior depends on how the array dimensions are specified at declaration: AMIQ Blog: Gotcha: The Behavior of Foreach Loop Variables Depends on How the Array Dimensions Are Specified
![]() Yet Another Memory Model was initially developed for modeling and managing a SystemVerilog memory. AMIQ just released YAMM 2.0 which also includes the C++ implementation: AMIQ Blog: YAMM 2.0 Release is Available
Yet Another Memory Model was initially developed for modeling and managing a SystemVerilog memory. AMIQ just released YAMM 2.0 which also includes the C++ implementation: AMIQ Blog: YAMM 2.0 Release is Available
Recommended Articles – August 2016
August is synonymous with vacation in many parts of the world, but not for everyone as you can see.
![]() Cristian shows how to implement the mechanism which allows UVM registers to be sensitive to more than one reset signal:
Cristian shows how to implement the mechanism which allows UVM registers to be sensitive to more than one reset signal:
CFSVision: SystemVerilog: How To Model Multiple Reset Signals in UVM Registers
![]() Tudor has a quick look at the SVAUnit library: VerificationGentleman: A Quick Look at SVAUnit
Tudor has a quick look at the SVAUnit library: VerificationGentleman: A Quick Look at SVAUnit
![]() Manish started a series of tutorials on SystemVerilog OOP (Object Oriented Programming) concepts like: class, objects, class constructor, class properties/methods, Copying Handles, copying objects, shallow copy, deep copy, static variables/methods, inheritance, polymorphism. They are a nice memory refreshment or a good starting point for people not used to OOP.
Manish started a series of tutorials on SystemVerilog OOP (Object Oriented Programming) concepts like: class, objects, class constructor, class properties/methods, Copying Handles, copying objects, shallow copy, deep copy, static variables/methods, inheritance, polymorphism. They are a nice memory refreshment or a good starting point for people not used to OOP.
![]() The latest article of the AMIQ – Gotcha series, illustrates what happens in SystemVerilog if static keyword is used both before and after the function or task keywords:
The latest article of the AMIQ – Gotcha series, illustrates what happens in SystemVerilog if static keyword is used both before and after the function or task keywords:
AMIQ – Gotcha: “static” function/task in SystemVerilog
Recommended Articles – July 2016
![]() Manish Singhal, from LearnUVMVerification, presents a list of advantages of using assertions and describes the arbitration mechanism of UVM Sequences.
Manish Singhal, from LearnUVMVerification, presents a list of advantages of using assertions and describes the arbitration mechanism of UVM Sequences.
![]() Keisuke Shimizu, from ClueLogic, shows how to dump transactions into a file using UVM do_record(). He also gives an overview of component overrides in UVM.
Keisuke Shimizu, from ClueLogic, shows how to dump transactions into a file using UVM do_record(). He also gives an overview of component overrides in UVM.
![]() A short and practical article from Bryan Murdock on streaming an array of bytes into a “mismatched size” struct.
A short and practical article from Bryan Murdock on streaming an array of bytes into a “mismatched size” struct.
![]() e-language users receive an update: it is now possible to use non-constants inside bin definitions of a coverage item. See Fine Tuning of Coverage Model Definition.
e-language users receive an update: it is now possible to use non-constants inside bin definitions of a coverage item. See Fine Tuning of Coverage Model Definition.
![]() As Specman is celebrating 20 years since its first introduction to the public, a good chance to recap Why Do We Need a Verification Language?
As Specman is celebrating 20 years since its first introduction to the public, a good chance to recap Why Do We Need a Verification Language?
Recommended Articles – June 2016
![]() Implementing coverage in SystemVerilog can become a challenging task. Horia presents the last article from a series of 3, on how to implement flexible coverage.
Implementing coverage in SystemVerilog can become a challenging task. Horia presents the last article from a series of 3, on how to implement flexible coverage.
AMIQ: How to Implement Flexible Coverage Definitions (Part 3)
![]() Henry Chan presents a high level overview of the uvm_reg package:
Henry Chan presents a high level overview of the uvm_reg package:
SemiEngineering: UVM Register Layer: The Structure
![]() Here it is a funny way of explaining verification to a kid:
Here it is a funny way of explaining verification to a kid:
Gaurav Jalan: Learning Verification with Angry Birds
![]() You should always use the macro `uvm_error() instead of uvm_report_error() function. Here’s why:
You should always use the macro `uvm_error() instead of uvm_report_error() function. Here’s why:
Munjal: Be careful while writing UVM Report Messages
![]() Keisuke Shimizu, from ClueLogic, shows how you can define/redefine the printing policy of UVM objects using do_print and uvm_printer:
Keisuke Shimizu, from ClueLogic, shows how you can define/redefine the printing policy of UVM objects using do_print and uvm_printer:
ClueLogic: UVM Tutorial for Candy Lovers – 33. Defining do_print
![]() CFSVision highlights a common mistake about naming scopes and constraints in SystemVerilog:
CFSVision highlights a common mistake about naming scopes and constraints in SystemVerilog:
CFSVision: SystemVerilog Gotcha: In-line Constraints Scope
Recommended Articles – May 2016
![]() Horia Enescu from AMIQ, started a series of posts that present how to implement flexible coverage definitions in SystemVerilog (Part 1 and Part 2). Horia uses option.weight and with-clause to allow coverage definitions to adapt to item’s bin range.
Horia Enescu from AMIQ, started a series of posts that present how to implement flexible coverage definitions in SystemVerilog (Part 1 and Part 2). Horia uses option.weight and with-clause to allow coverage definitions to adapt to item’s bin range.
![]() New entry on our list VerificationSudha encourages UVM dissection and brings to surface internal information about UVM: Part I and Part II.
New entry on our list VerificationSudha encourages UVM dissection and brings to surface internal information about UVM: Part I and Part II.
Error handling in serial communication is a complex task and so is verifying it. If you are new to error scenarios, I definitely recommend reading these series of articles from VerificationSudha: understanding errors, creating a plan and prioritize error scenarios, defining error capabilities of the verification environment, implementing error injection capability, creating directed and random tests and writing coverage for verification closure definition.
![]() Manish Singhal, from LearnUVMVerification wrote three more articles: UVM phasing in UVM1.2, How to finish an UVM test and what are the Debug tools within UVM.
Manish Singhal, from LearnUVMVerification wrote three more articles: UVM phasing in UVM1.2, How to finish an UVM test and what are the Debug tools within UVM.
![]() VerificationGentleman, continues his odyssey with SystemVerilog reflection API. In Part 1 he described how to create a reflection manager using DPI and VPI. In Part 2 he wrestles with language or compiler limitations, and in the end he achieves his goals to get and set the variables of a class.
VerificationGentleman, continues his odyssey with SystemVerilog reflection API. In Part 1 he described how to create a reflection manager using DPI and VPI. In Part 2 he wrestles with language or compiler limitations, and in the end he achieves his goals to get and set the variables of a class.
Recommended Articles – April 2016
![]() Ionut shares with us the highlights of DVCon-US 2016 conference. Ionut attended various presentations and also contributed an SVAUnit tutorial.
Ionut shares with us the highlights of DVCon-US 2016 conference. Ionut attended various presentations and also contributed an SVAUnit tutorial.
![]() “A picture is worth a thousand words”. Stefan takes that principle and applies it on DUT data flows representation, so let the picture speak for itself:
“A picture is worth a thousand words”. Stefan takes that principle and applies it on DUT data flows representation, so let the picture speak for itself:
How To Graphically Represent DUT’s Data Flows
![]() Munjal continues to address topics from SystemVerilog and UVM. This time he focuses on killing a process in SystemVerilog and using sub-phases and the phase jump concept from UVM.
Munjal continues to address topics from SystemVerilog and UVM. This time he focuses on killing a process in SystemVerilog and using sub-phases and the phase jump concept from UVM.
![]() Keisuke Shimizu shows us how to customize message format in UVM 1.2 and how to use randc to generate all types of a sequence item.
Keisuke Shimizu shows us how to customize message format in UVM 1.2 and how to use randc to generate all types of a sequence item.
![]() VerificationGentleman explores the implementation of a reflection mechanism in SystemVerilog:
VerificationGentleman explores the implementation of a reflection mechanism in SystemVerilog:
VerificationGentleman: The Humble Beginnings of a SystemVerilog Reflection API
![]() Handling reset when using UVM is an important task for a verification environment. CFSVision suggests one way of doing it:
Handling reset when using UVM is an important task for a verification environment. CFSVision suggests one way of doing it:
CFSVision: SystemVerilog: How To Handle Reset In UVM
![]() Efrat Shneydor shows a nice way of building generic scoreboards by using templates. Take a look and feel the full power of e-language constructs:
Efrat Shneydor shows a nice way of building generic scoreboards by using templates. Take a look and feel the full power of e-language constructs:
Cadence: Building Efficient Scoreboards
Recommended Articles March 2016
![]() VerificationAcademy started to collect verification patterns on the Patterns Library webpage.
VerificationAcademy started to collect verification patterns on the Patterns Library webpage.
Mentor Graphics wrote an article introducing this new page.
![]() LearnUVMVerification explains in an intuitive way the UVM reporting. They also provided us with Part 2 of “How virtual sequence works” (this is Part 1 in case you missed it).
LearnUVMVerification explains in an intuitive way the UVM reporting. They also provided us with Part 2 of “How virtual sequence works” (this is Part 1 in case you missed it).
![]() Zeev Kirshenbaum/Cadence, presents in one of the Whiteboard Wednesday episode how stimulus can be driven to a DUT via a TLM 2.0 connection without prior knowledge of the protocol used by DUT:
Zeev Kirshenbaum/Cadence, presents in one of the Whiteboard Wednesday episode how stimulus can be driven to a DUT via a TLM 2.0 connection without prior knowledge of the protocol used by DUT:
Cadence: Whiteboard Wednesdays – Reusable Data-Driven Verification Using TLM 2.0
![]() Cristian Slav/CFSVision, inspects the capabilities of SystemVerilog’s “interface class” construct and proposes a way of emulating a multiple inheritance behavior:
Cristian Slav/CFSVision, inspects the capabilities of SystemVerilog’s “interface class” construct and proposes a way of emulating a multiple inheritance behavior:
Multiple Inheritance In SystemVerilog
![]() Tudor Timisescu/VerificationGetleman, presents a way of ending an UVM test in a clean and safe way:
Tudor Timisescu/VerificationGetleman, presents a way of ending an UVM test in a clean and safe way:
VerificationGentleman: An Overview of UVM End-of-Test Mechanisms
![]() Stefan Birman/AMIQ presents How to Check Out-Of-Order Transactions and plans to upload it as a new pattern on the VerificationAcademy’s Patterns Library webpage.
Stefan Birman/AMIQ presents How to Check Out-Of-Order Transactions and plans to upload it as a new pattern on the VerificationAcademy’s Patterns Library webpage.
![]() Either you are a designer or not we advise you to read Jason Yu’s compelling article about Clock Domain Crossing (CDC):
Either you are a designer or not we advise you to read Jason Yu’s compelling article about Clock Domain Crossing (CDC):
VerilogPro: Clock Domain Crossing Techniques – Part 1
![]() Keisuke Shimizu/ClueLogic, enhances a previously designed driver in order to receive responses:
Keisuke Shimizu/ClueLogic, enhances a previously designed driver in order to receive responses:
UVM Tutorial for Candy Lovers – 31. Provides Responses?
![]() Specman Team/Cadence implemented a new extension to the e-language templates:
Specman Team/Cadence implemented a new extension to the e-language templates:
Cadence: e Templates – Cool Tool, Now Even Cooler
We plan to post the Recommended Articles few days sooner than the end of the month.

