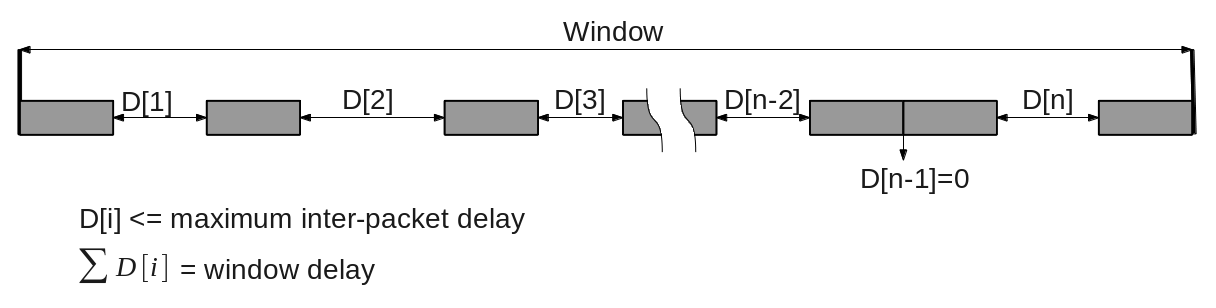
Recently, I’ve verified how a DUT tolerates inter-packet delays. Basically, I’ve driven a fixed number of packets with the following constraints:
- Each inter-packet delay must not exceed a maximum inter-packet delay value
- The sum of all inter-packet delays must be equal with a specified window delay value
At first glance, the most interesting cases appear to be those in which most packets are driven at the begining or at the end of the window, eventually back to back. However, because I don’t have any knowledge about DUT’s internals, I have to make sure I cover all possible scenarios.
For example, if I have to drive 10 packets with maximum inter-packet delay of 3 and window delay of 15, there are 27876 scenarios. In terms of functional coverage implementation, out of 262144 combinations of 9 inter-packet delays (physical space), only 27876 combinations fit the window delay of 15 (valid space).
What I am going to do is searching for a solution to generate random packet sequences that cover all possible scenarios in a reasonable amount of time. For this purpose, I will choose two approaches and then compare them:
- On-the-fly: generate inter-packet delay before driving each packet
- Top-down: generate all inter-packet delays up-front and use them when driving each packet
In both cases, I am going to define a sequence of packets with the following properties:
class ..._seq extends uvm_sequence #(packet);
//number of packets
rand int unsigned nof_packets;
//maximum inter-packet delay
rand int unsigned max_delay;
//window delay
rand int unsigned window_delay;
...
endclass
Every packet has a delay property which represents the amount of time to wait before driving the packet. The sequence above always drives the first packet immediately (first packet delay is zero).
class packet extends uvm_sequence_item;
// wait delay before driving
rand int delay;
...
endclass
On-the-fly Inter-Packet Delay Generation
An on-the-fly sequence generates the inter-packet delay before driving each packet.
class on_the_fly_seq extends uvm_sequence #(packet);
...
task body();
// holds the generated delays
int inter_packet_delay[nof_packets-1];
// first packet is driven immediately
`uvm_do_with (req, {req.delay == 0;});
// for the rest, generate delay before driving the packet
for(int i = 1; i < nof_packets; i++)begin
// available delay
int available_window_delay = window_delay - inter_packet_delay.sum();
// if not enough delay is used early,
// we may end with too much available delay for later packets
int min_delay = available_window_delay - max_delay*(nof_packets-i-1);
assert(randomize(new_delay) with {
// legal delay between 0 and max delay
new_delay inside {[0:max_delay]};
// at least minimum delay
new_delay >= min_delay;
// at most available window delay
new_delay <= available_window_delay;
});
inter_packet_delay[i-1] = new_delay;
`uvm_do_with (req, {req.delay == inter_packet_delay[i-1];});
end
endtask
endclass
Top-down Inter-Packet Delay Generation
A top-down sequence generates all inter-packet delays up-front:
class top_down_seq extends uvm_sequence #(packet);
...
task body();
// holds the generated delays
int inter_packet_delay[nof_packets-1];
// first packet is driven immediately
`uvm_do_with ( req,{req.delay == 0;});
// generate delays up-front
assert(randomize(inter_packet_delay) with {
// sum of all inter-packet delays equal to window delay
inter_packet_delay.sum() == window_delay;
// legal delay between 0 and max delay
foreach(inter_packet_delay[i])
inter_packet_delay[i] inside {[0:max_delay]};
});
// drive the rest of the packets
for(int i = 1; i < nof_packets; i++)begin
`uvm_do_with ( req,{req.delay == inter_packet_delay[i-1];});
end
endtask
endclass
Coverage Closure – maximum inter-packet delay 3, window delay 15
The valid space size is 27876.
The charts below show the coverage progress for three simulators when driving 10 packets with maximum inter-packet delay 3 and window delay 15.



On-the-fly
- Simulator 1: 100% after 640k samples
- Simulator 2: 100% after 560k samples
- Simulator 3: 100% after 560k samples
Top-down
- Simulator 1: 99% in 1M samples – Coverage closure is more efficient using on-the-fly generation.
- Simulator 2: 100% after 250k samples – Coverage closure is more efficient using top-down generation.
- Simulator 3: 100% after 470k samples
In the best case, the number of generation cycles required to fill the coverage is 10 times the size of the valid space.
Coverage Closure – maximum inter-packet delay 4, window delay 20
The valid space size is 162585.
The charts below show the coverage progress for the same three simulators when driving 10 packets with maximum inter-packet delay 4 and window delay 20.



On-the-fly
- Simulator 1: 97% after 1M samples
- Simulator 2: 97% after 1M samples
- Simulator 3: 97% after 1M samples
Top-down
- Simulator 1: 79% in 1M samples – Coverage closure is more efficient using on-the-fly generation.
- Simulator 2: 99.8% after 1M samples – Coverage closure is more efficient using top-down generation.
- Simulator 3: 99.3% after 1M samples – Coverage closure is more efficient using top-down generation.
Conclusions
Top-down or On-the-fly
Intuitively, I’ve expected the top-down approach to be more efficient, because all the constraints are specified directly on the generated list, and a generator could uniformly spread values in the valid space. However, this is not true for all simulators. Simulator 1 above does not fill coverage faster in a top-down approach.
Coverage Closure Benchmarks
Simulator 2 seems to be more efficient in terms of coverage progress. It needs fewer samples to reach boundaries like 80%, 90% or 100%, especially using the top-down approach.
Since the intriguing question has always been whether the simulation speed is the only criteria for choosing a simulator, perhaps we should take into consideration the coverage closure speed, as coverage closure is something we look for, when doing verification.
One may say that bugs linger around, not necessarily pinpointed by coverage samples, and filling coverage slower raises the probability of hitting unexpected corner cases. A slower coverage closure simulator may prove beneficial for discovering bugs.
However, the verification process should be controllable; the verification plan describes interesting scenarios that should be covered, and that’s why we spend a lot of time filling coverage. I believe that one should consider coverage closure speed when it comes to choosing a simulator.
I wonder: what should be the coverage closure benchmarks for measuring a simulator performance?
7 Responses
When doing your benchmarks, did you do multiple individual runs or just one big long run?
Hi Tudor,
I run one big test with multiple sequences.
Claudia
This isn’t the usual case (in my opinion). When you’re writing “real” tests you tend to write short ones that only start a couple of packets. You run these tests multiple times and merge the coverage. It would be interesting to see what happens if you do multiple short runs of say 100 packets (the 100 can also be a parameter) and merge them together. How many runs would you need per simulator? This might be an extra metric to consider for coverage closure speed.
Could you please let me know what do you mean by “This isn’t the usual case”? This article presents a case where a specific sequence of packets must be covered. A similar simpler case is a transition of two packets where you want to cover packet properties crossed with inter-packet delay. Typically one generates packets one by one (on-the-fly), no matter the larger coverage context that may require a redesign (top-down) to speed-up coverage closure.
I agree that coverage closure speed of one vs. many simulations is worth considering when deciding how to partition a regression. My guess is that some measurements must be performed when planning regressions and the verification team should decide based on their specific verification environment. However I see this as an orthogonal dimension to the considerations in my article.
By “this isn’t the usual case” I mean that in a real life project you don’t try to fill all of your coverage in one long test run, but in multiple short runs (due to practical reasons, e.g. parallelization, debugability, etc.). This is orthogonal to generating on the fly or pre-generating a big list of stimulus to run in that test.
I think that the “On the fly” approach doesn’t gives equal distribution between packets delays (latest packets have less probability to get long delays), and as conclusion it seems that Simulator 1 have bad constraint solver implementation for the top-down approach (i guess it somehow solve it by order like the “on the fly” approach)
Hi Claudia
How did we arrive at the total valid space of 27876 combination… Can you please explain it?